

Method for automatic parking speed control based on image vision
A technology of automatic parking and vehicle speed control, applied in the field of parking, can solve problems such as uneven speed, deviation, emergency stop and braking, etc., to improve parking safety, enhance experience, and improve smoothness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
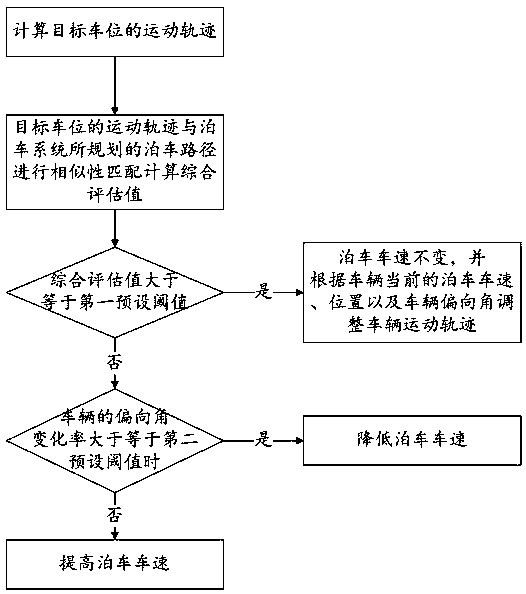
[0054] A method for automatic parking speed control based on image vision, such as figure 1 shown, including the following steps:
[0055] S10. Collect the real-time sequence images of the target parking space during the moving process of the vehicle, and calculate the trajectory of the target parking space through the real-time sequence images.
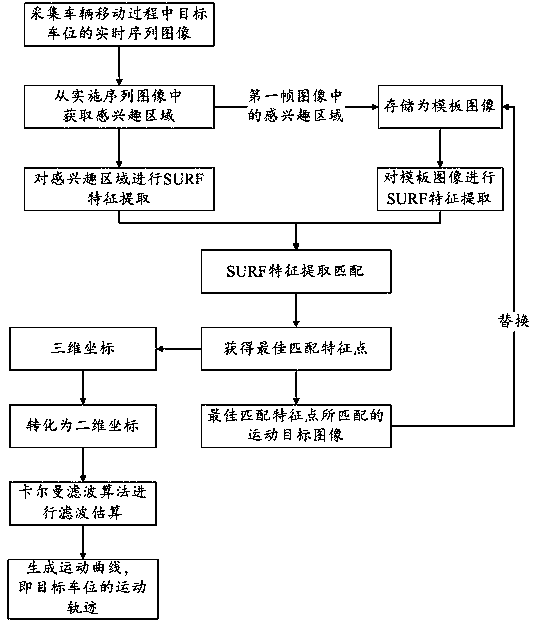
[0056] This step is as figure 2 shown, including:
[0057] S101. Collect the real-time sequence images of the target parking space during the moving process of the vehicle through the visual detection module.
[0058] S102. Extract and match the SURF features in the real-time sequence images to obtain the best matching feature points.
[0059] In this step, the acquisition of the best matching feature points is specifically as follows:
[0060] Obtain the region of interest from the first frame image collected, and store the region of interest as a template image.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More