Grey wolf optimization algorithm-based RBPF-SLAM improvement method
A technology of RBPF-SLAM, optimization algorithm, applied in the direction of calculation, calculation model, electromagnetic wave re-radiation, etc., can solve the problem that the distribution of the particle set cannot well represent the posterior probability density, deviation, particle degradation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
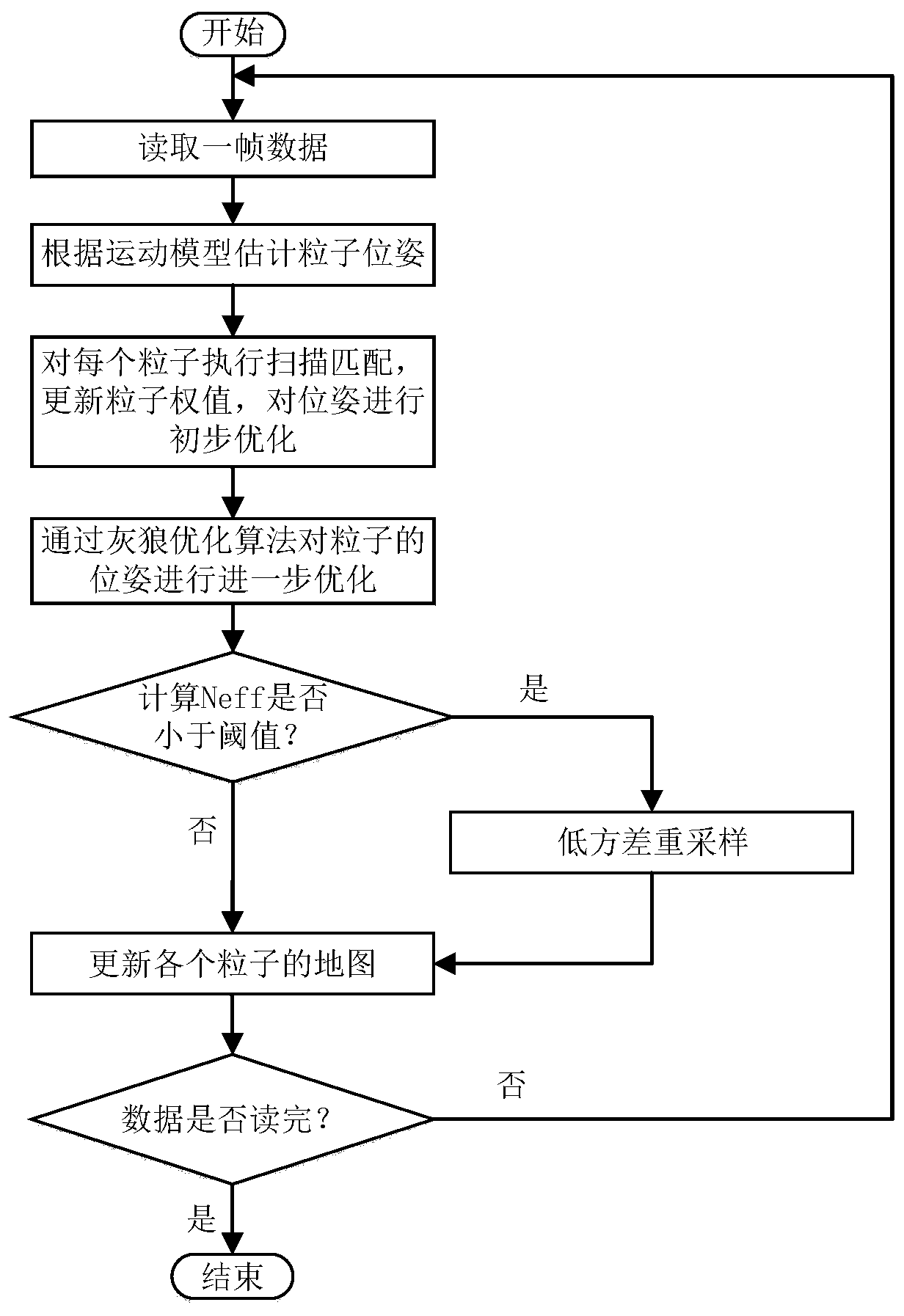
[0045] Such as figure 1 As shown, an indoor positioning method based on laser SLAM includes the following steps:
[0046] The first step is sampling. Particles based on the previous moment and the odometer data obtained at this moment to generate a preliminary estimated state at time t This step consists of transitioning from the state distribution p(x t |u t ,x t-1 ) sampling, the sampled particles are evenly distributed with a particle weight of 1 / N, where N is the number of particles.
[0047] In the second step, according to the data obtained from the lidar sensor and the independent map of each particle at the last moment Execute the mountain-climbing scanning matching algorithm to perform preliminary optimization on the particle pose in the previous step. The mountain-climbing scanning matching algorithm starts from the current pose, and fine-tunes the pose on the surrounding grids as its comparison point. If the matching degree of the current pose is the highes...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com