

A Multi-mode Hybrid Manipulator Based on Motion Bifurcation Mechanism
A motion bifurcation, multi-mode technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of complex coordinate motion coordinate establishment process, limit the robot's ability to perform tasks, increase production input costs, etc., and achieve a good environment. Adaptability, reduce production input costs, and improve the effect of finishing quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention will be described in detail below with reference to the accompanying drawings and specific embodiments. This embodiment is implemented on the premise of the technical solution of the present invention, and provides a detailed implementation manner and a specific operation process, but the protection scope of the present invention is not limited to the following embodiments.
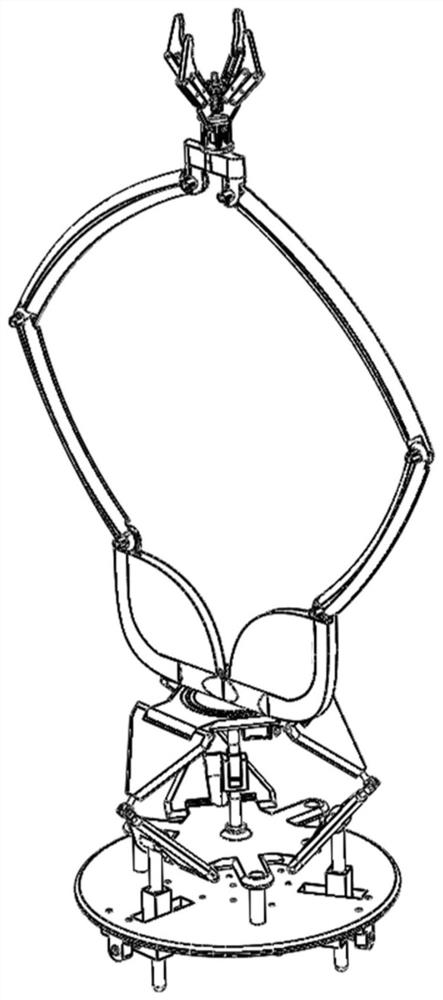
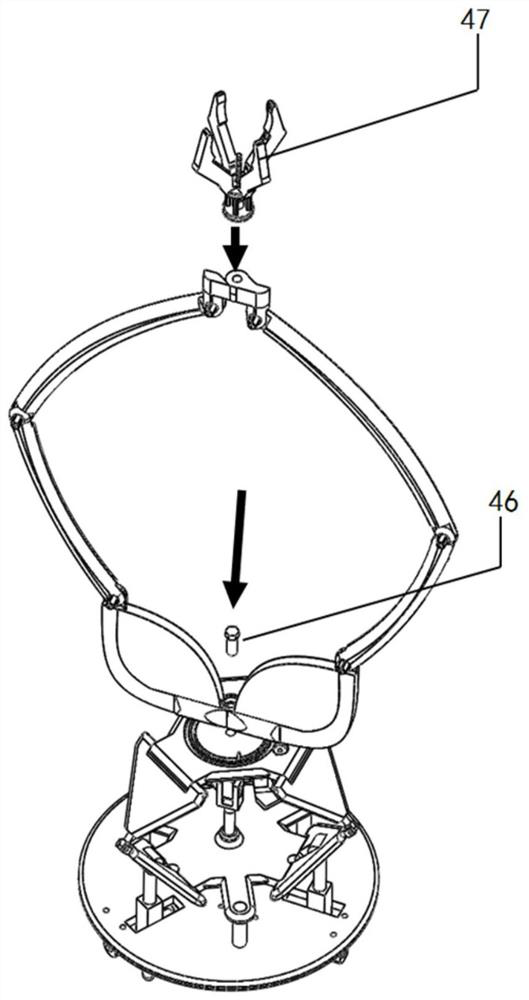
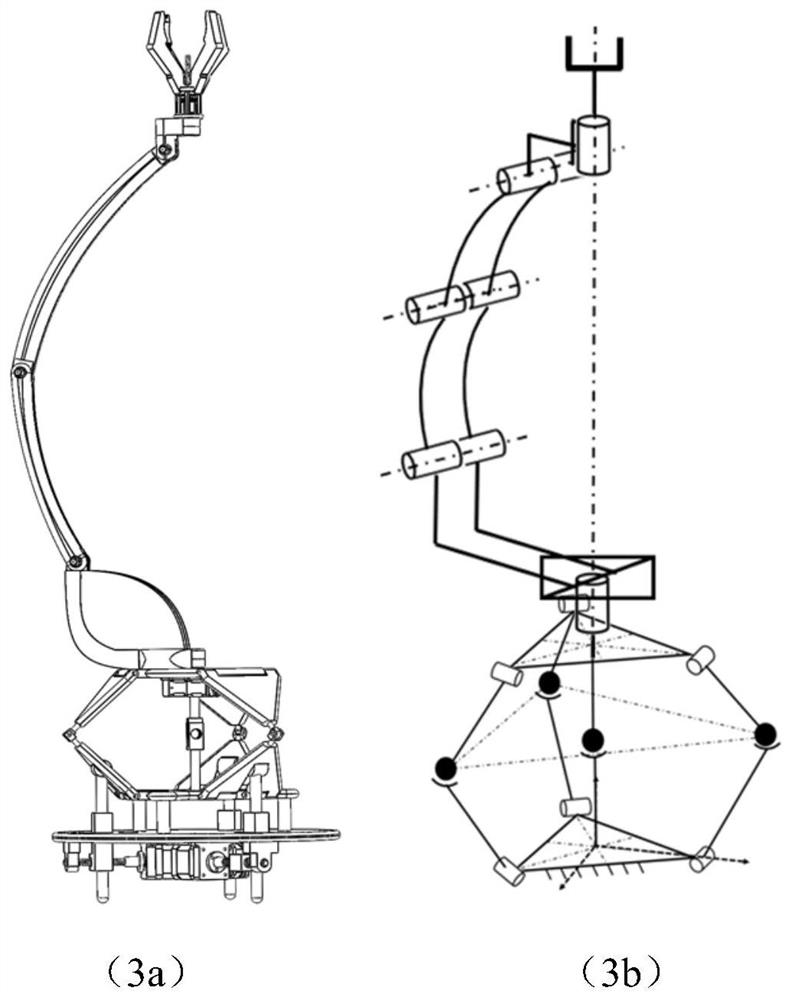
[0048] like Figure 1-Figure 2 As shown, this embodiment provides a multi-mode hybrid robotic arm based on a motion bifurcation mechanism, including an end effector 47, an arm and a parallel base that are connected in sequence, and the arm is an 8-bar single-loop motion bifurcation The mechanism includes two symmetrically arranged arm branch chains, two ends of the two arm branch chains are movably connected to form a single-loop closed chain structure, each of the arm branch chains includes four connecting rods that are movably connected in sequence, and the arm portion is co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More