

Robot high-speed high-precision motion trajectory planning method and device, equipment and medium
A trajectory planning and motion trajectory technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as reducing accuracy and ignoring mutual influences
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment
[0084] Taking a six-degree-of-freedom industrial robot as the research object, the high-speed and high-precision motion trajectory planning of the robot is carried out according to the following steps.
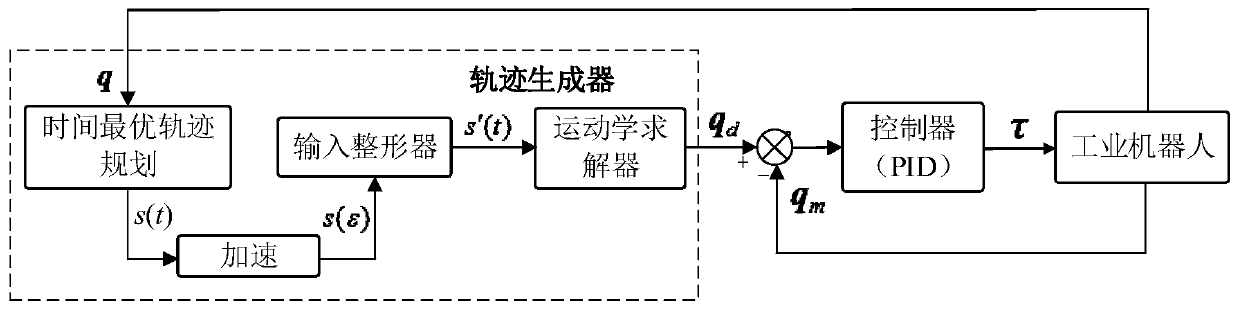
[0085] Such as figure 1 As shown, a trajectory planning method for high-speed and high-precision movement of a robot includes steps:
[0086] Through time-optimal trajectory planning, the motion parameters of the robot are optimized and solved in the parameter space, and the original motion trajectory expressed in the parameter space is obtained;
[0087] Analyze the vibration signal of the robot based on the flexible joint model of the robot, calculate the modal parameters, and design the corresponding input shaper;
[0088] Calculating an appropriate compensation coefficient according to the delay time of the input shaper to accelerate the original motion trajectory, thereby compensating for the trajectory delay caused by input shaping;
[0089] In the parameter space, inp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More