

Laser Point Cloud Matching Method Based on Grouped Stepped Threshold Judgment
A technology of threshold judgment and laser point cloud, which is applied in the field of robot navigation, can solve the problems of inability to avoid obstacles, large amount of calculation, poor positioning effect, etc., and achieve the effect of improving obstacle avoidance function and reducing calculation amount
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0037] According to the attached figure 1 , give a preferred embodiment of the present invention, and give a detailed description, so that the functions and characteristics of the present invention can be better understood.
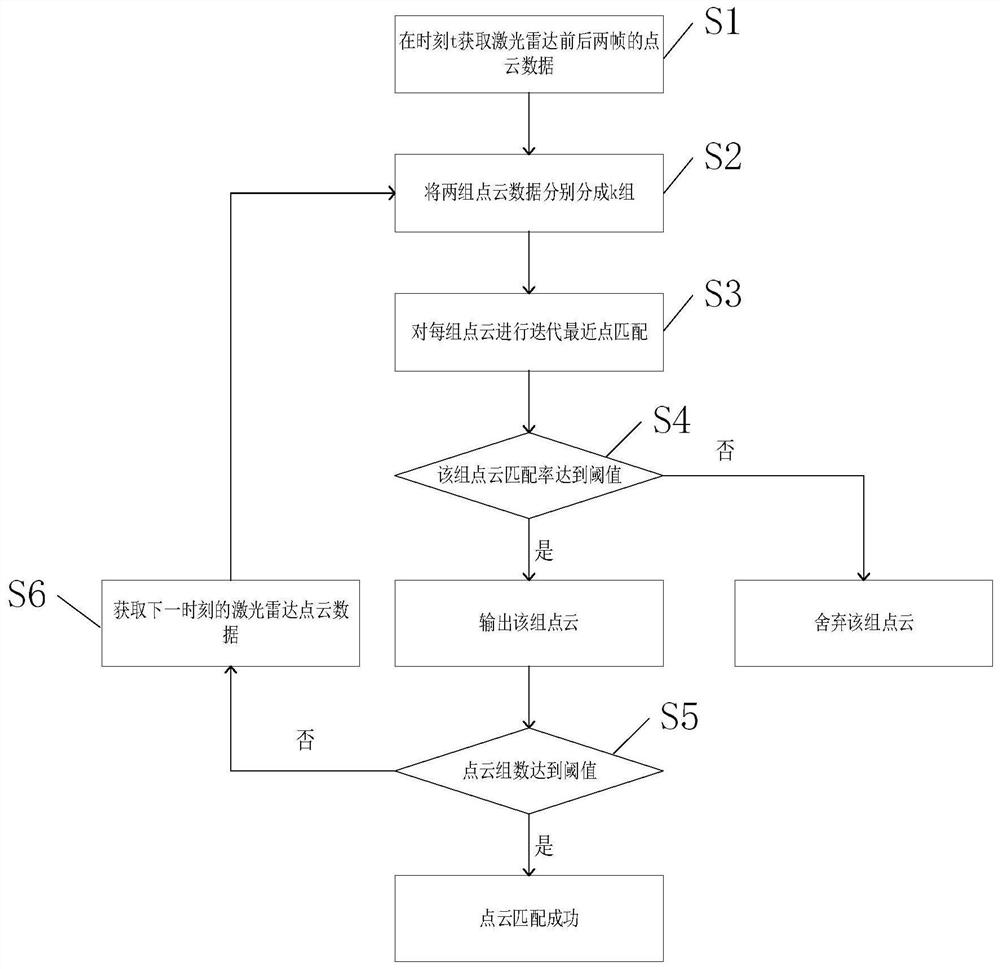
[0038] see figure 1 , a kind of laser point cloud matching method based on grouping stepped threshold judgment according to an embodiment of the present invention, comprising steps:
[0039] S1: Acquiring the first point cloud data M of the previous frame and the second point cloud data N of the next frame of a lidar at the current moment.
[0040] S2: Divide the current first point cloud data M and the second point cloud data N into the first cloud data subgroup and the second cloud data subgroup of fixed arrays respectively; the first cloud data subgroup and the second cloud data subgroup respectively Include multiple point clouds.
[0041] S3: Perform iterative closest point matching on each point cloud of the current first point cloud data M and th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More