

Seafloor seismograph position and orientation inversion method based on water wave first arrival polarization orientation
A technology of polarization azimuth and seismograph, applied in seismology, seismology, instruments, etc. in areas covered by water, can solve problems such as non-convergence, and achieve fast convergence speed, good stability, and good accuracy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0042] This embodiment provides a position and azimuth inversion method of a submarine seismograph based on the first arrival polarization azimuth of water waves, specifically:
[0043] S1. According to the design deployment position of the submarine seismograph to be corrected, use the seismograph to receive the three-component seismic waveform signals of N shot points in different positions
[0044] S2. It is assumed that the designed deployment position of the submarine seismograph to be corrected on the seabed is (x, y), the actual position is (x+δx, y+δy), and (δx, δy) is the offset.
[0045] According to the nature of the longitudinal wave, the polarization direction of the longitudinal wave is the same as the direction of propagation, so the first arrival polarization orientation of the signal emitted by the shot point is consistent with the direction in which the position of the submarine seismograph to be corrected points to the shot point, and the position of the subm...
Embodiment 2
[0064] This embodiment aims to provide an error calculation method for the inversion result obtained by the method described in Embodiment 1.
[0065] In this embodiment, the bootstrap method is used to give the error estimation of the inversion results. The specific method is to generate a set of theoretical observation data according to the actual shot point / station position according to the given actual first-arrival polarization data and azimuth error information, and The residual of the original data is randomly added to the theoretical data, and then the inversion calculation is performed on these theoretical observation data, and the statistical variance of the result is used as the error.
[0066] For a submarine seismograph, it is assumed that there are N shot point data involved in the calculation, and the data involved include the station’s horizontal position and azimuth (lat, lon, φ 0 ), shot point coordinates, azimuth and residuals (lat i , lon i , θ i , r i ...
Embodiment 3
[0072] This example aims to further test the method described in Example 1.
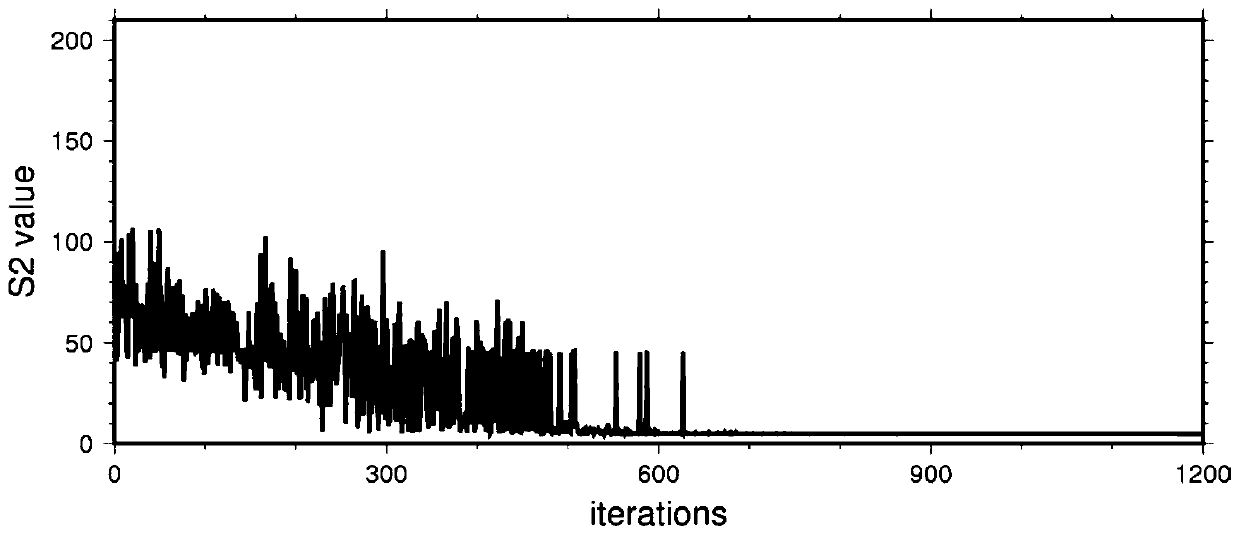
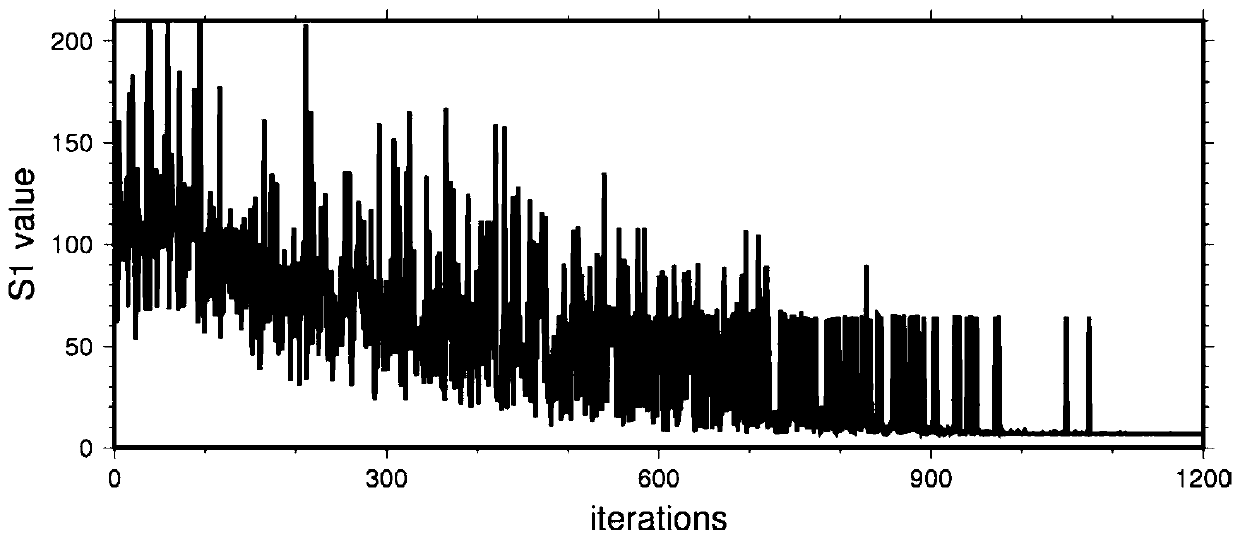
[0073] In order to test the above method, this example carried out theoretical model tests and actual data processing respectively. The data used came from the OBS observation conducted in a certain area of the South my country Sea in 2003. There were 5 OBS stations for this observation. The theoretical model adopts the actual observation system of obs4, and adds a random disturbance with a mean value of 0 and a Gaussian distribution to the azimuth obtained by theoretical calculation. The variance of the random disturbance is 6°, (φ 0 , δx, δy) the true value of each value is 0. Table 1 shows the statistical results of 1000 such calculations. From the results in Table 1, it can be seen that the results of the nonlinear inversion method are better than those of the linear inversion method, and the average value of each inversion quantity is closer to the true value. , the variance is also smaller. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More