

Multi-target autonomous collision avoidance method for unmanned ship
An unmanned boat, multi-target technology, applied in the field of navigation and navigation, can solve problems such as difficulty in meeting practical applications and poor real-time performance, achieve good practical application value, and ensure the effect of navigation safety.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] Embodiments of the present invention will be described in further detail below in conjunction with the accompanying drawings.
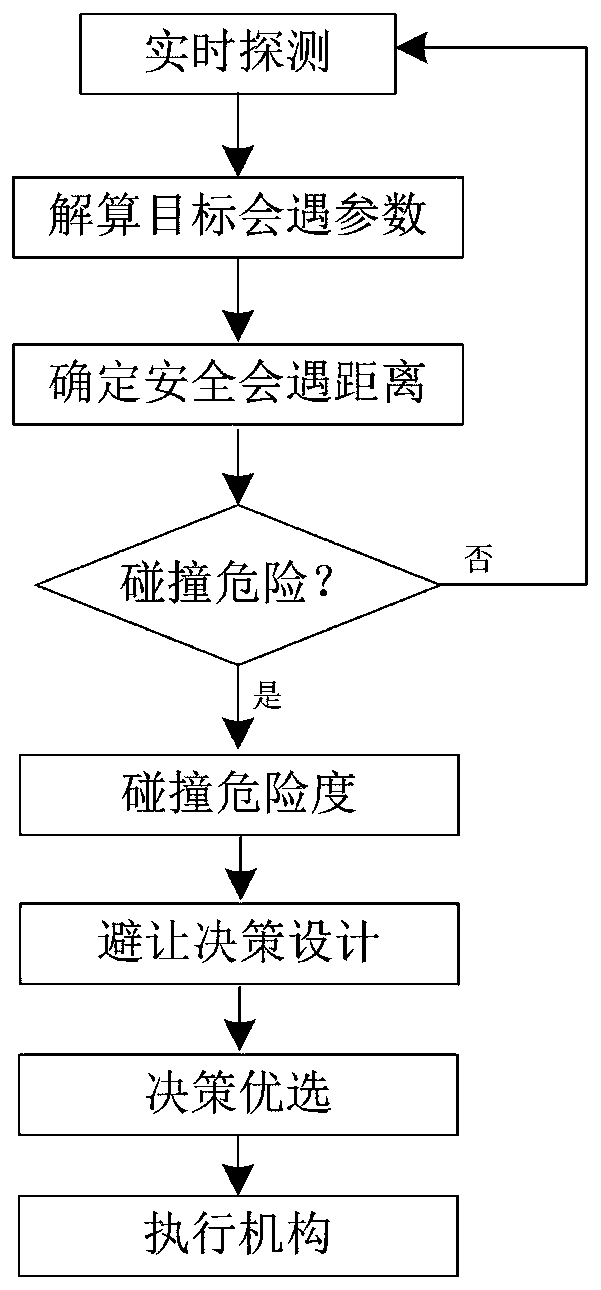
[0030] A multi-target autonomous collision avoidance method for unmanned boats, such as figure 1 shown, including the following steps:
[0031] Step 1. Calculate the closest encounter distance DCPA and the closest encounter time TCPA based on the detected target information and the ship's navigation status information.
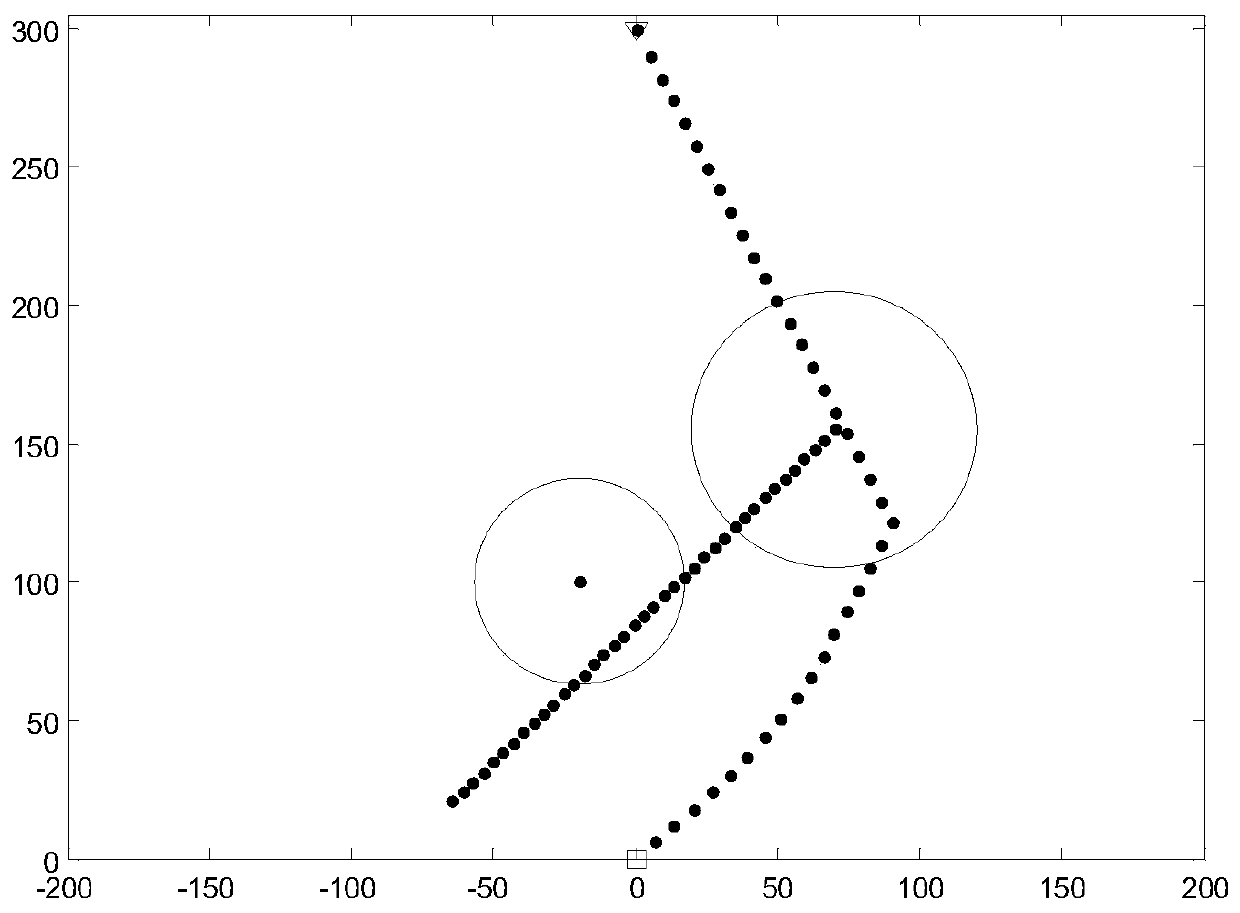
[0032] Such as figure 2 As shown, in this embodiment, one static target is 102m away from the own ship, with an azimuth of -11.3°; the other dynamic target is 170m away from the own ship, with an azimuth of 24.3°, a speed of 10kn, and a heading of 225°. The boat initially sails at 18kn towards 0°; the target waypoint is 300m ahead. Among them, DCPA1=20, TCPA1=11.1 for the static target; DCPA2=25.3, TCPA2=12.9 for the dynamic target.
[0033] Step 2. Determine the safe meeting distance according to the navigation status of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More