

A fire-fighting robot automatic cooperative reconnaissance and fire-fighting operation method
A fire-fighting robot and robot technology, which is used in motor vehicles, fire rescue, transportation and packaging, etc., can solve the problems that the positioning accuracy depends on the GPS positioning accuracy, the GPS positioning system cannot work, and the binocular vision positioning fails, so as to reduce the complexity. and cost, improve measurement efficiency and system stability, improve reconnaissance efficiency and the effect of
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The following are specific examples of the present invention, further describing the technical solutions of the present invention, but the protection scope of the present invention is not limited to these examples. All changes or equivalent substitutions that do not depart from the concept of the present invention are included in the protection scope of the present invention.
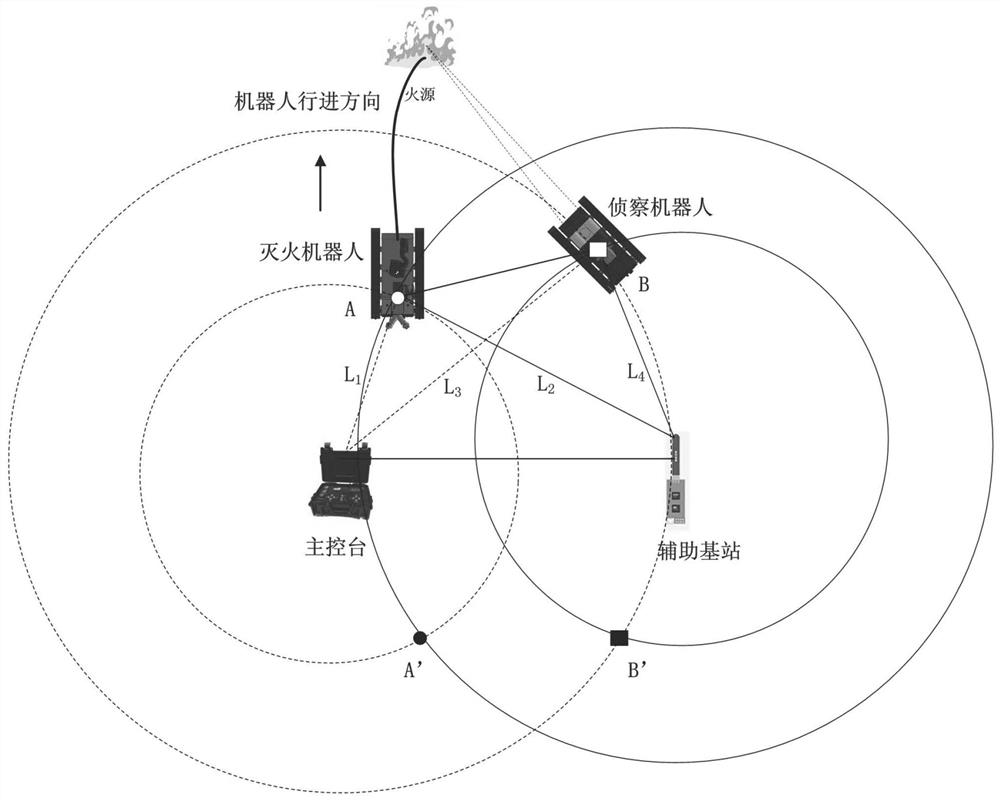
[0045] The fully automatic cooperative reconnaissance and fire extinguishing operation method of fire robots comprises the following steps:
[0046] 1) Place console 3 and define its spatial position as (0,0,z 1 ), where z 1 The height can be quickly measured according to the previous design or on site;
[0047] 2) place the auxiliary base station 4, and define its spatial position as (x 2 ,y 2 ,z 2 ), where x 2 ,y 2 The parameters can be obtained by direct measurement on site, z 2 The height can also be quickly measured according to the previous design or on-site;
[0048] 3) arrange th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More