

Fire-fighting robot collaborative positioning, reconnaissance, fire source identification and targeting fire-extinguishing method
A fire-fighting robot and collaborative positioning technology, which is applied in the field of fire source identification and targeting fire extinguishing, reconnaissance, and fire-fighting robot collaborative positioning. On-site processing speed and wide application range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The following are specific examples of the present invention, further describing the technical solutions of the present invention, but the protection scope of the present invention is not limited to these examples. All changes or equivalent substitutions that do not depart from the concept of the present invention are included in the protection scope of the present invention.
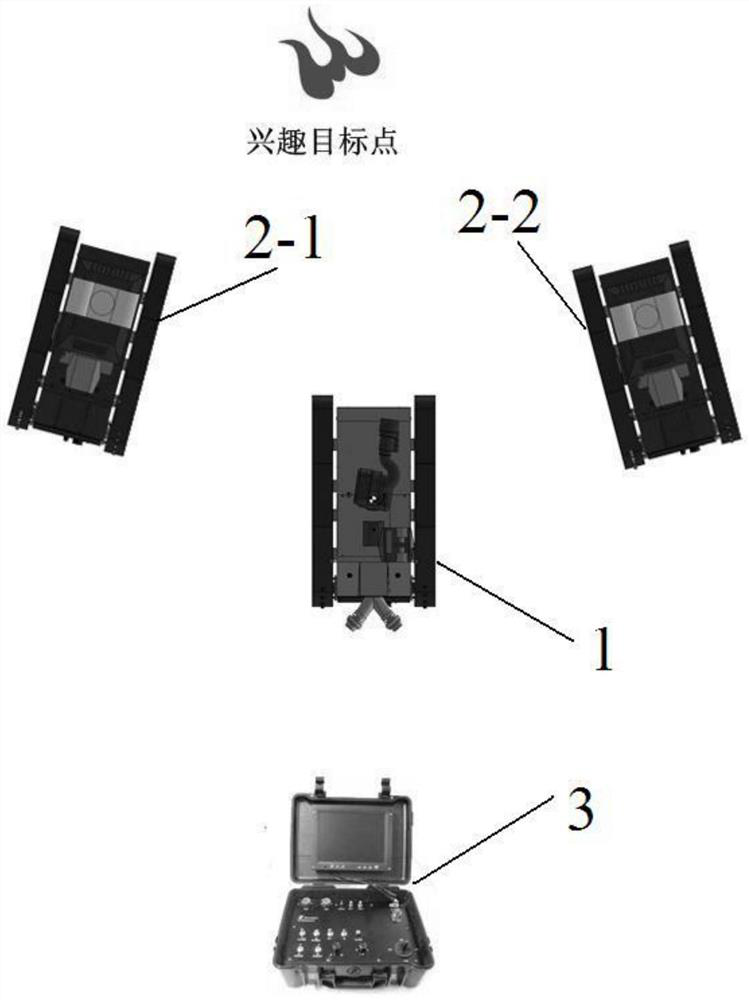
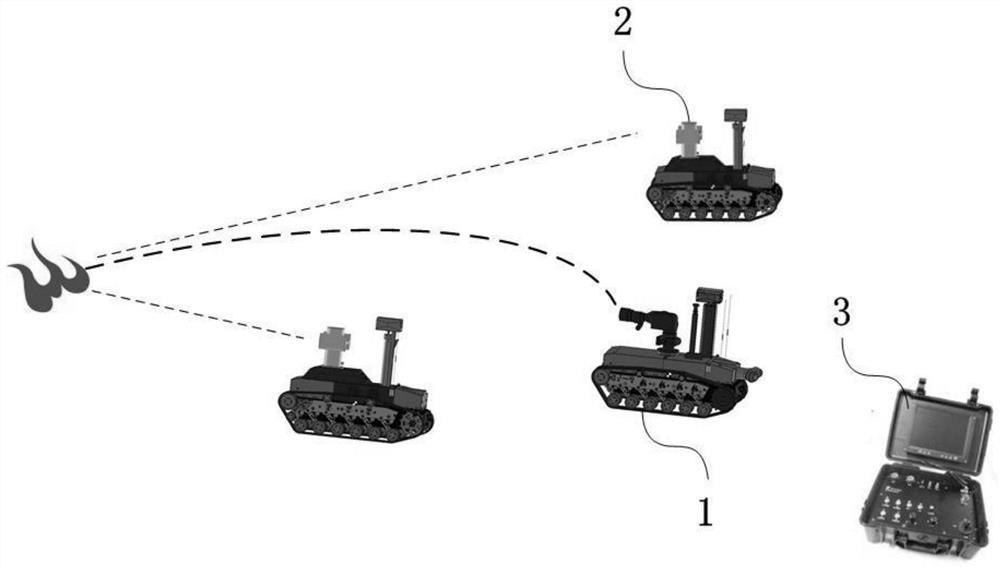
[0051] Such as figure 1 , 3 As shown, the fire-fighting robot collaborative positioning, reconnaissance, fire source identification and aiming fire extinguishing system includes fire-fighting robot 1, reconnaissance robot 2 and console 3, fire-fighting robot 1 and reconnaissance robot 2 are controlled by console 3, fire-fighting robot 1, reconnaissance robot The robot 2 and the console 3 are connected wirelessly to each other.
[0052] The number of fire-fighting robots 1 is M, where M≥1, including the first fire-fighting robot 1-1, the second fire-fighting robot 1-2, ..., the Mth fire-fighting...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More