

Method and device for positioning person in pipe gallery
A technology for personnel positioning and pipe gallery, which is applied in positioning, measuring devices, instruments, etc., and can solve the problems of large environmental impact of positioning technology and large accumulation of positioning technology errors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0148] Example 1: Use the received signal of the Bluetooth beacon to correct the particle weight
[0149] In the present invention, the weight of each particle can be corrected by using the received signal of the Bluetooth beacon.
[0150] In described step (P1-3), also include:
[0151] Judging whether the first condition is met, the first condition is the existence of rss k,n , making set up,
[0152] If it is judged that j=2 is established and the first condition is not satisfied, step (3) is executed;
[0153] If it is judged that j=2 is established and the first condition is satisfied, the coordinates of each particle in the particle set in the map coordinate system are cleared, and the coordinates of the nth Bluetooth beacon in the map coordinate system are used to set the coordinates of each particle in the particle set on the map The coordinates in the coordinate system are initialized, and the heading angle of each particle in the map coordinate system remains un...
Embodiment 2
[0172] Example 2: Use the map to correct particle weights
[0173] The difference between this embodiment 2 and embodiment 1 is that if the accuracy requirement is not high, only two Bluetooth beacons can be set, and after the first coordinate transformation formula is calculated by using the two Bluetooth beacons, the Bluetooth correction can be prohibited weights, only the particle weights are corrected with the map.
[0174] Step (P1-1): Load the binarized raster map of the positioning environment.
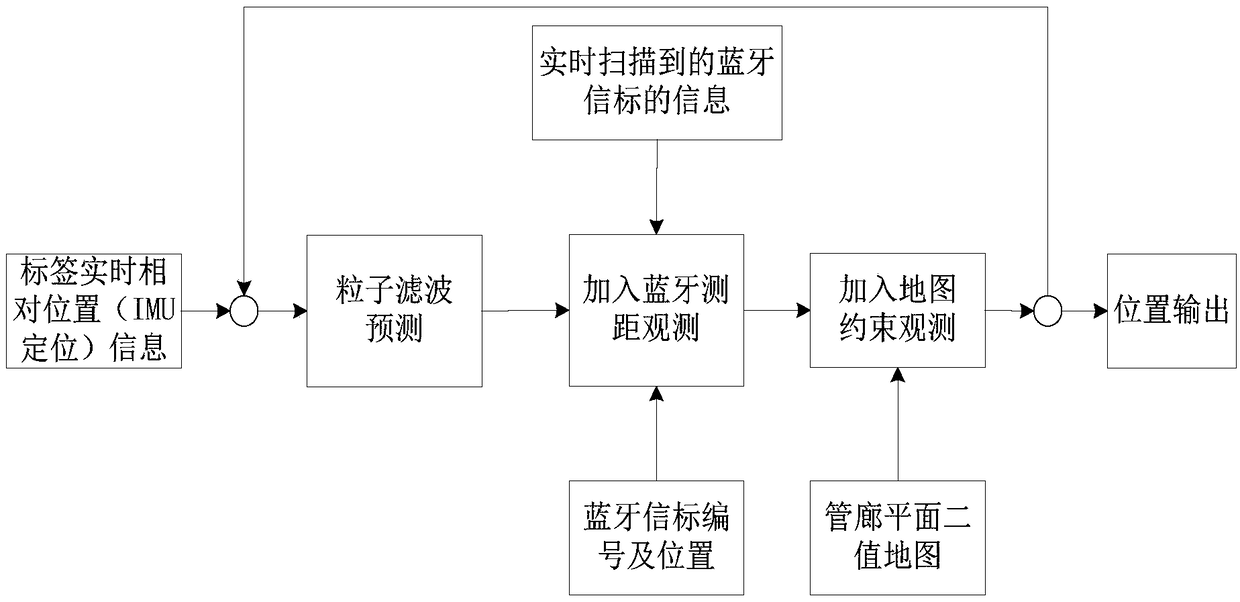
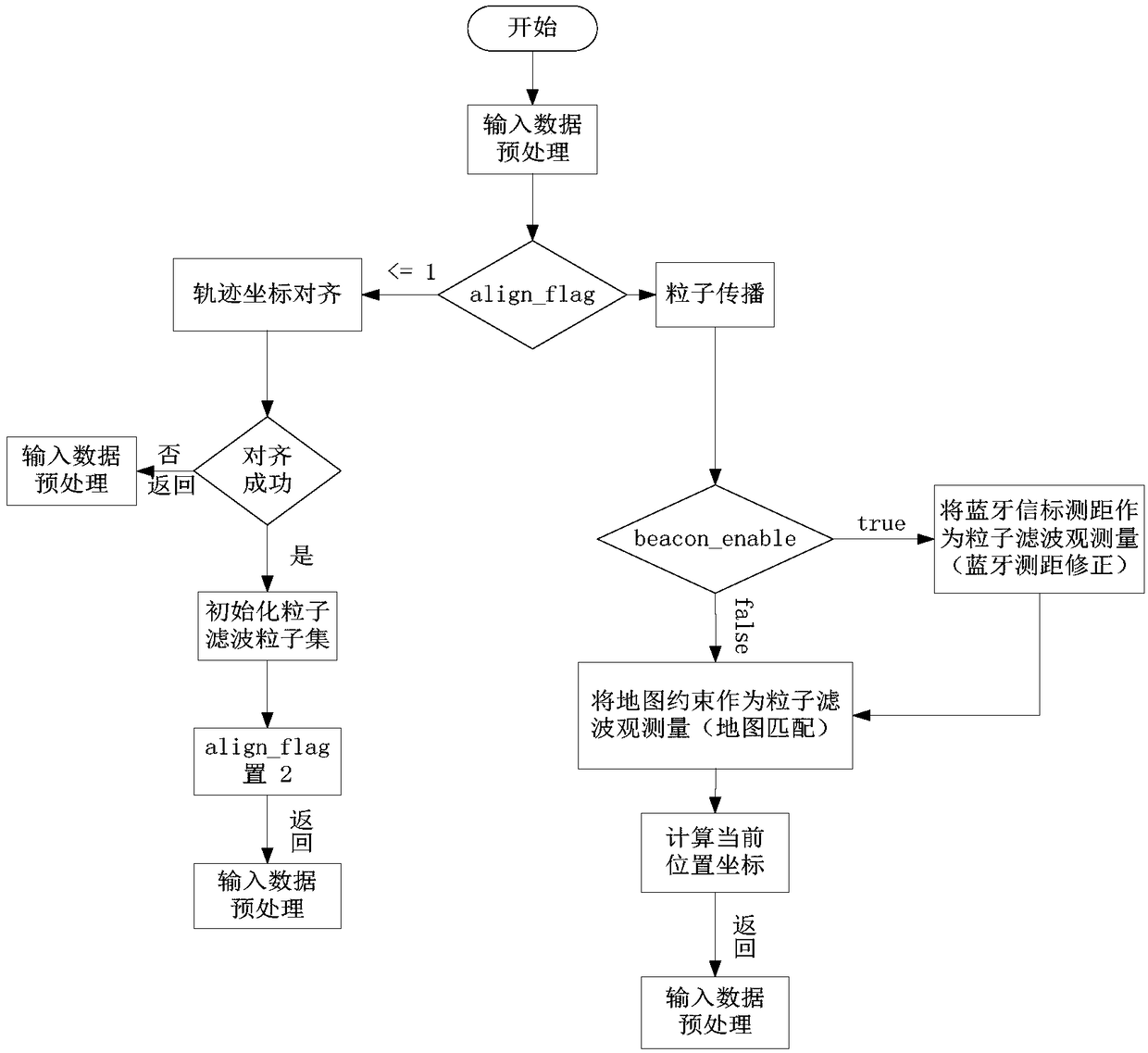
[0175] In occasions where the accuracy is not high, you can only set two Bluetooth beacons, and then disable Bluetooth correction weights, and only use map corrections, then only set two Bluetooth beacons. Therefore let beacon_enable=false.
[0176] According to the map constraint correction method, the particle weight is updated, and then the particle set is resampled, and (8) is executed;
[0177] In the present invention, the flag bit beacon_enable can be set, if beacon_e...
Embodiment 3
[0191] Example 3: Use the map to correct particle weights
[0192] The difference between the third embodiment and the first embodiment is that the received signal of the Bluetooth beacon and the map can be combined to modify the weight of the particles at the same time, that is, the method of the first embodiment and the second embodiment can be used in combination. In step (3), if it is judged that the second condition is met, then according to the rss k,n calculate t k The weight of each particle at all times; after step (3), execute step (P1), use the map to correct the weight of the particle, that is, correct the weight of the particle by judging whether the particle passes through the wall, if all particles pass through the wall, use the step (B1)-(B5) re-initialize the coordinates of each particle.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More