

Global sliding-mode control method for bridge crane system
A technology of bridge crane and control method, which is applied in the direction of load hanging components, transportation and packaging, etc., and can solve the problems of not being robust in the whole process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0117] Embodiment 1, the global sliding mode control method of overhead crane system, comprises the following steps:
[0118] Step 1, determine the kinetic model;
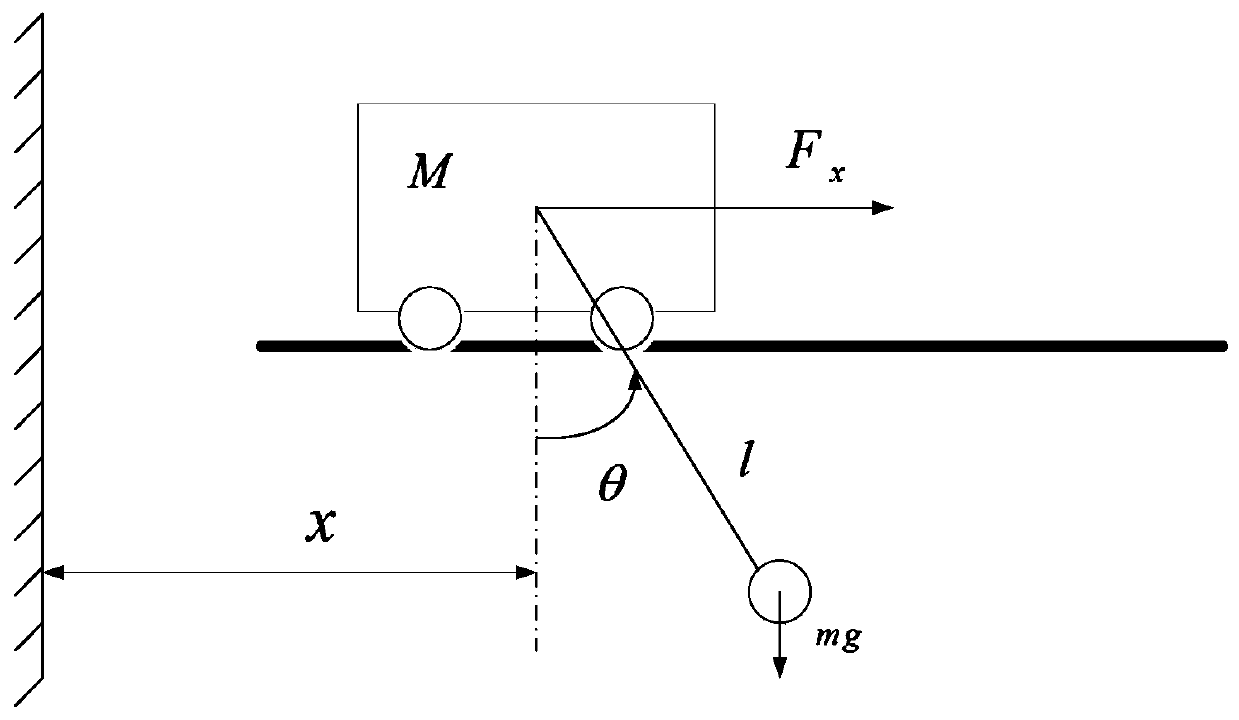
[0119] The present invention contemplates an overhead crane system comprising a trolley capable of one-dimensional translational movement along the bridge frame and a load attached to the trolley by a fixed length of rope. Based on the Euler-Lagrangian equation, the dynamic equation of the overhead crane system is as follows:
[0120]
[0121]
[0122] Among them, M and m are the masses of the trolley and the load respectively, the length of the fixed sling is l, g represents the acceleration of gravity; x represents the horizontal displacement of the trolley from the initial position, represents the speed of the trolley, Indicates the acceleration of the trolley; θ indicates the load swing angle, Indicates the angular velocity of the load swing angle, Indicates the angular acceleration of the load sw...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More