

Method for determining vehicle pose, vehicle-mounted system and vehicle
An in-vehicle system and pose technology, which is applied to in-vehicle systems and vehicles to determine vehicle poses, can solve the problems of limited field of view of monocular cameras, affecting the positioning accuracy and continuity of monocular SLAM, and improve the accuracy of pose estimation. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
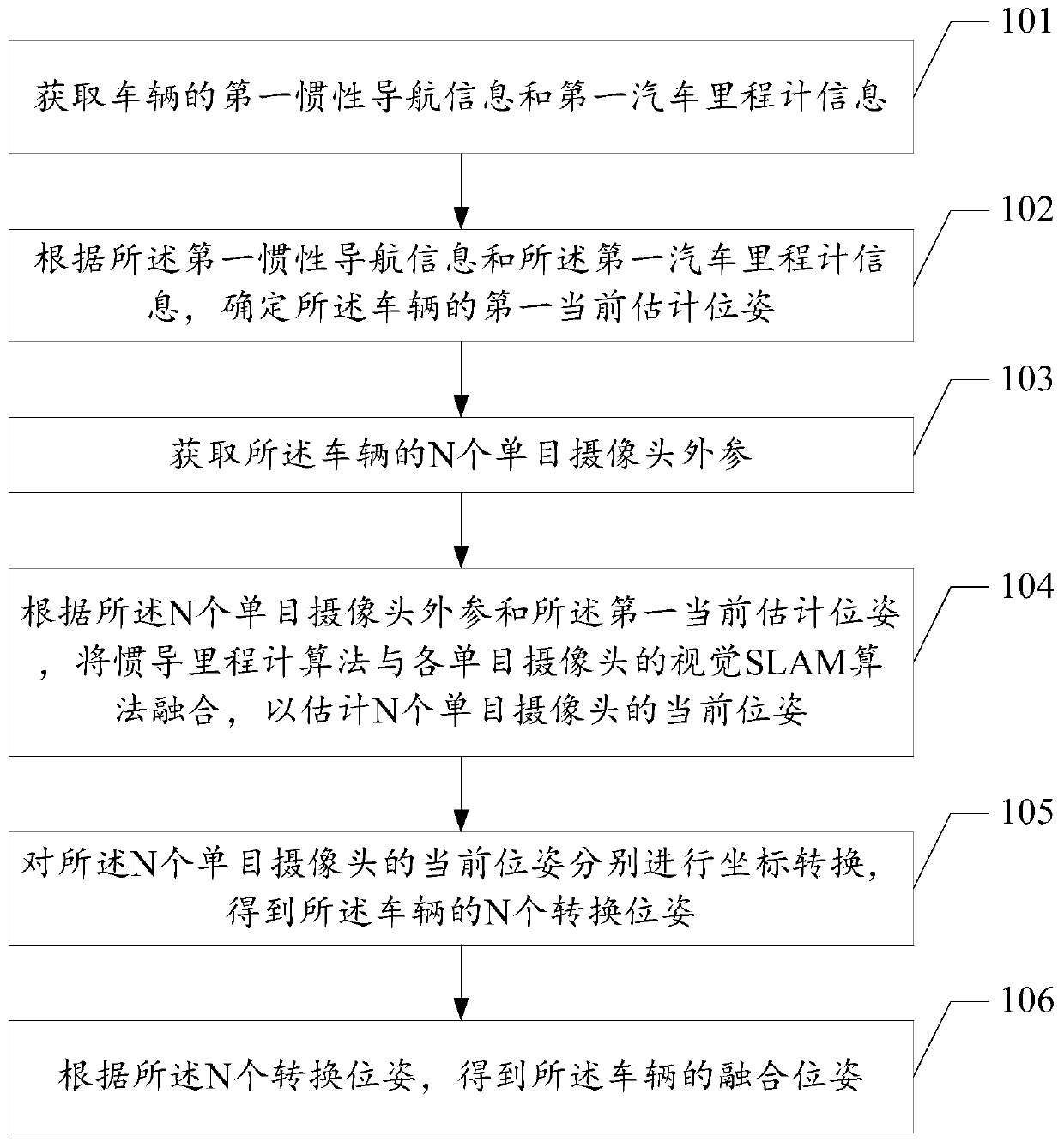
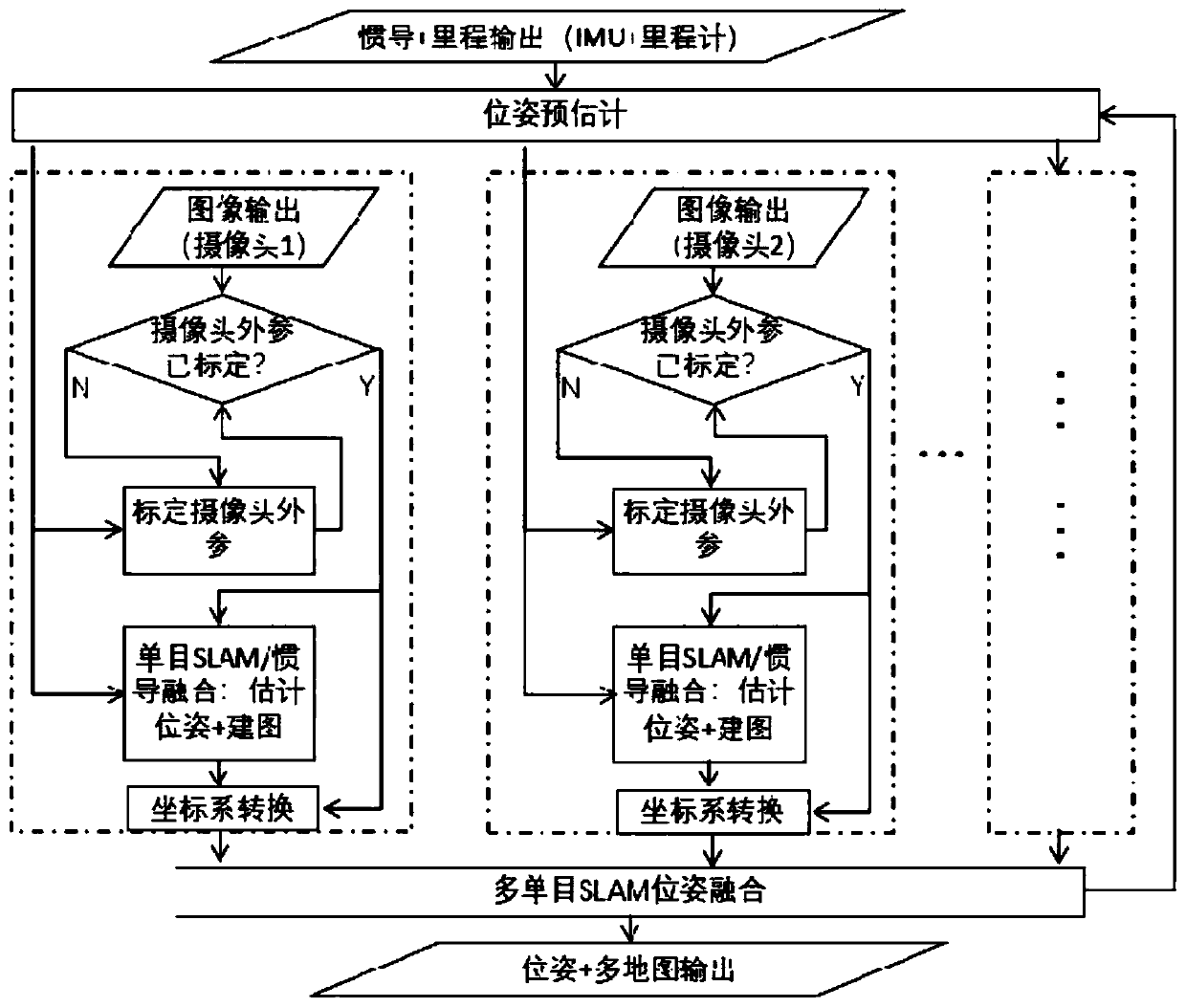
[0056] Embodiments of the present invention provide a method for determining the pose of a vehicle, an on-board system, and a vehicle, which are used to obtain the converted pose according to the external parameters of multiple monocular cameras of the vehicle, perform fusion, and obtain the fused pose of the vehicle, thereby , to improve the accuracy of the pose estimation of the vehicle.
[0057] In order to enable those skilled in the art to better understand the solution of the present invention, the following will describe the technical solution in the embodiment of the present invention in conjunction with the accompanying drawings in the embodiment of the present invention. Obviously, the described embodiment is only a part of the present invention Examples, but not all examples. All embodiments based on the present invention shall belong to the protection scope of the present invention.
[0058] A brief description of the technical terms involved in the embodiments of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More