

Dynamic residual threshold adaptive quaternion particle filter attitude calculation data fusion method
A particle filter and data fusion technology, which is applied in complex mathematical operations, calculations, computer components, etc., can solve problems such as large output data errors and affecting filtering effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
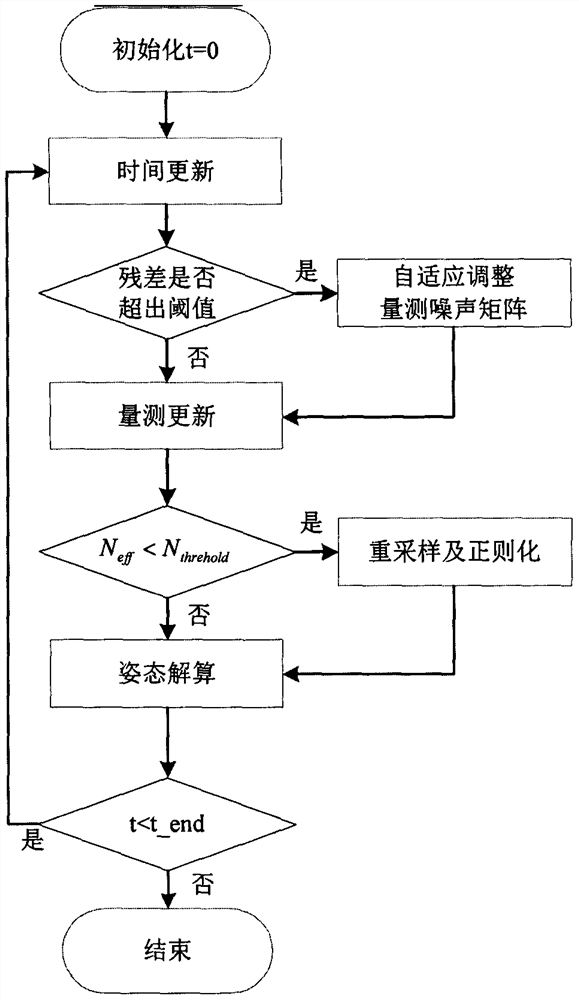
[0075] The following describes the embodiment of the present invention in detail, and this embodiment is exemplary, and is only used to explain the present invention, and should not be construed as limiting the present invention. A dynamic residual threshold adaptive quaternion particle filter attitude calculation data fusion method of the present invention will be described in detail below with reference to the accompanying drawings.
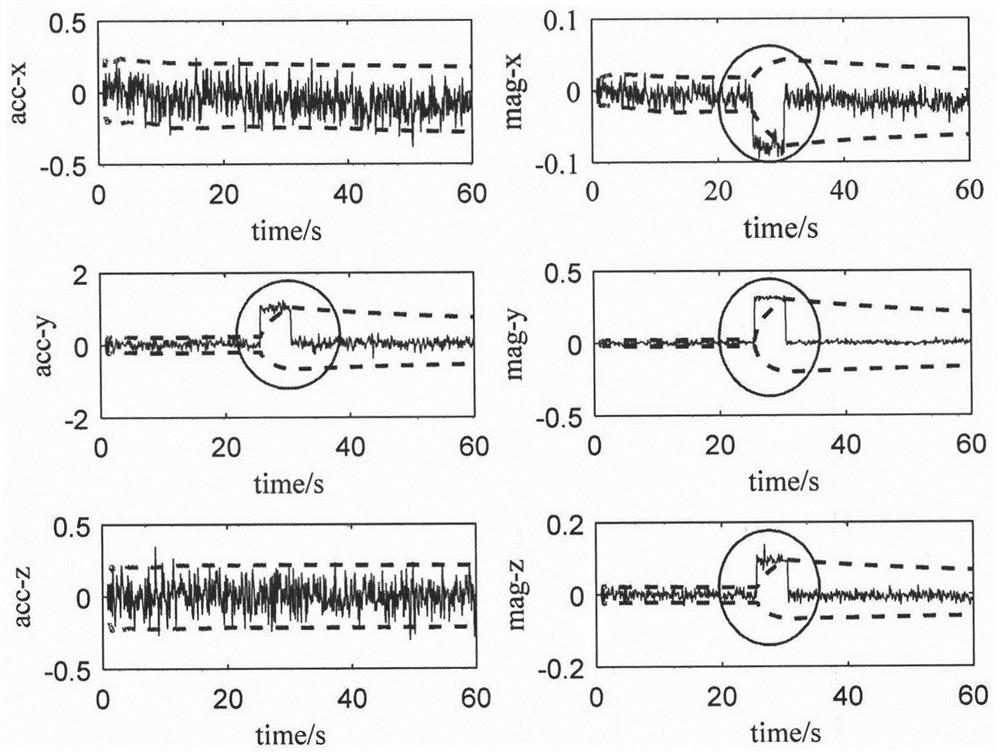
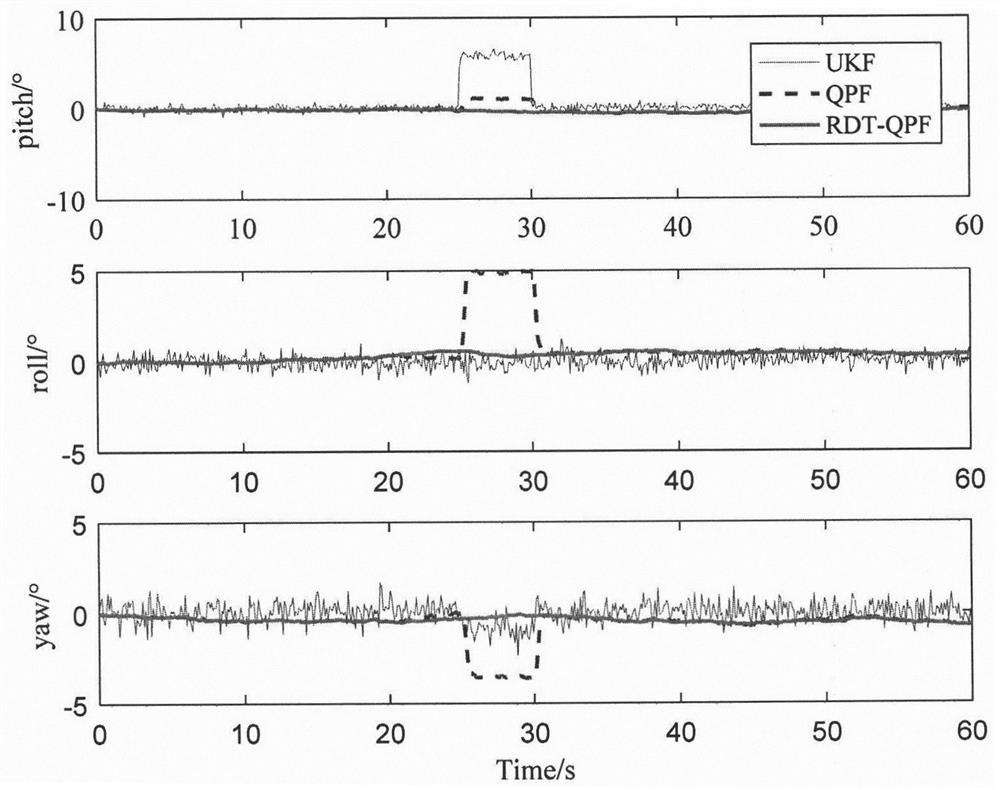
[0076] In order to better reflect the implementation and effect of the specific steps of the present invention, the following simulation experiments are set up: use the MATLAB simulation platform to verify the performance of the algorithm. In this experimental environment, the following measurement models can be built:
[0077] The gyroscope output model can be expressed as ω b =ω+ε, where ω is the true angular velocity, and ε is the output error of the gyroscope, which mainly includes three components: ε=ε b +ε r +n g , where ε b is a ran...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More