

Cooperative learning and formation control method for isomorphic multi-unmanned surface vehicle system
A control method and unmanned boat technology, which is applied in the field of formation control of unmanned boats, and can solve problems such as the limited sensing range of a single unmanned boat
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
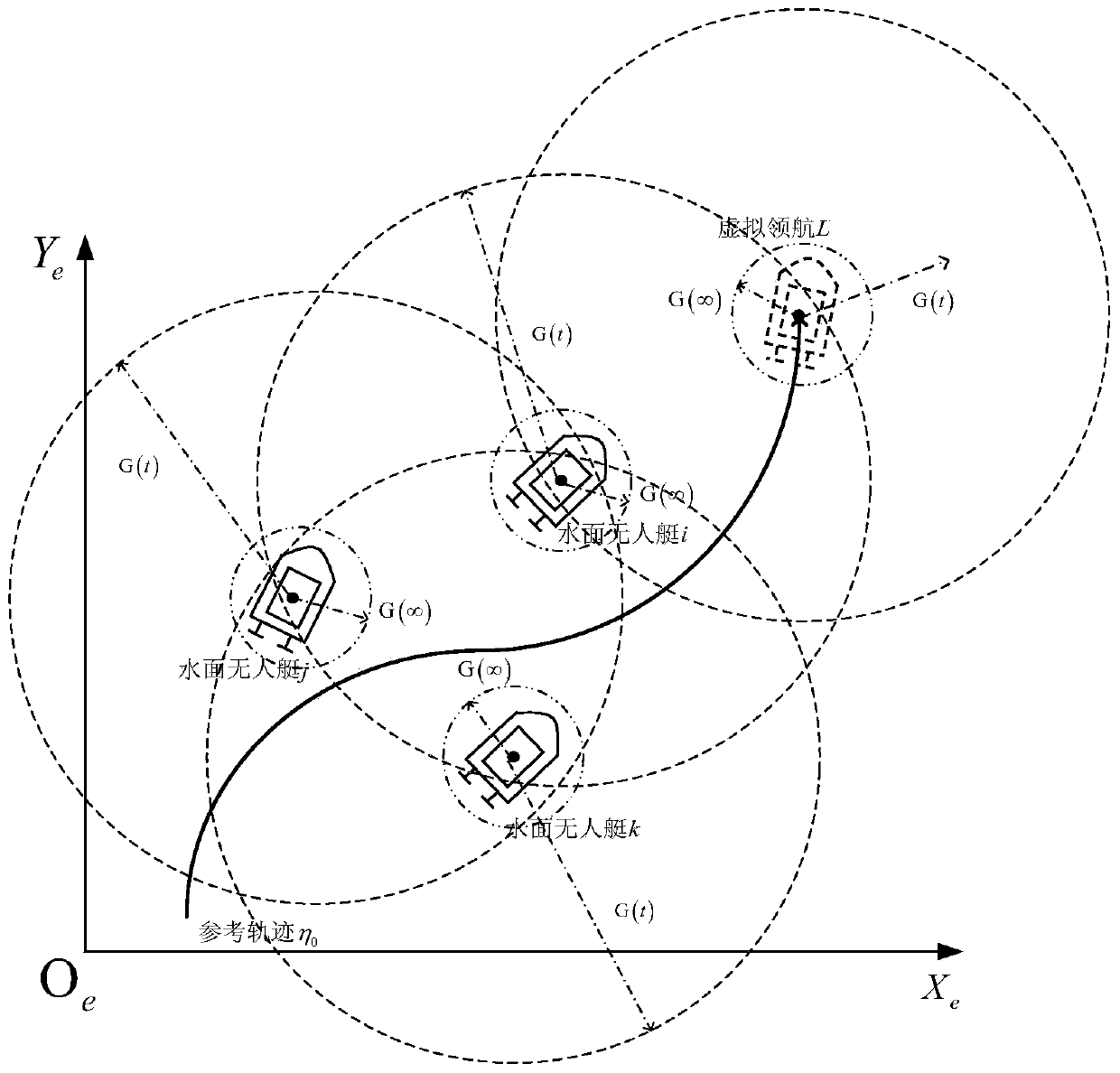
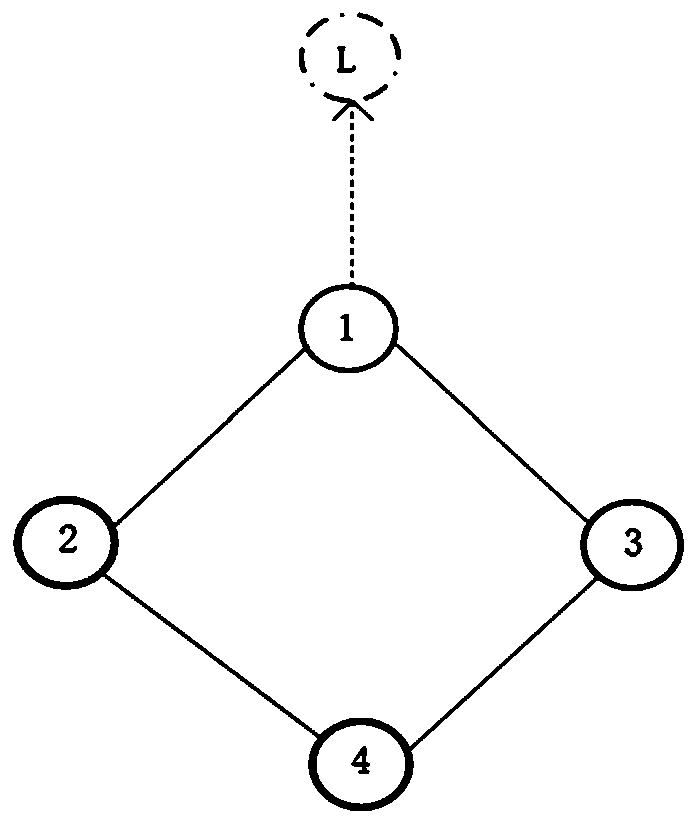
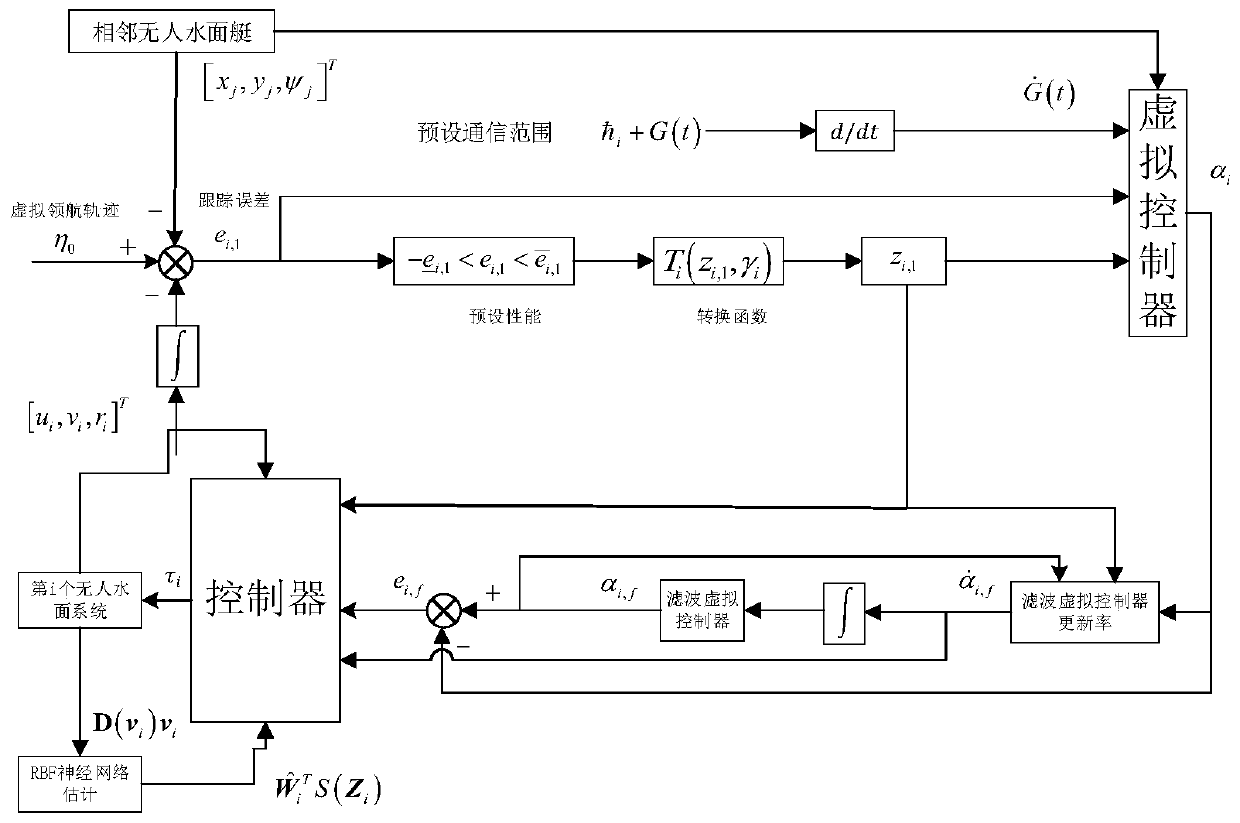
[0082] This embodiment provides a collaborative learning and formation control method for a homogeneous multi-unmanned boat system. This method aims at maintaining connection and cooperative control in the formation control of unmanned boats, and proposes a method based on a distributed leader-follower structure. Formation control method, distributed leader-follower formation structure diagram as shown in figure 1 as shown, figure 2 is the phaseless communication topology diagram of the homogeneous UAV formation system, image 3 It is an overall control block diagram of the formation control of the isomorphic unmanned boat, and the method specifically includes the following steps:
[0083] Step (1): In the unmanned boat formation, the task of each unmanned boat is the same or similar, and the environment of each unmanned boat is similar (the communication range of the unmanned boat is limited, and each unmanned boat in the formation is at least as close as One unmanned boat m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More