

Wire-controlled chassis track tracking control system and method based on UWB positioning
A trajectory tracking and control system technology, applied in the field of trajectory tracking, can solve problems such as difficult balance between cost and accuracy, fusion of vehicle perception systems, insufficient positioning accuracy, etc., achieve good system robustness and safety, and enhance system robustness performance and save computing cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The present invention will be described in further detail below in conjunction with the accompanying drawings.
[0049] The invention is based on the UWB near-field positioning technology and the vehicle track tracking technology, and completes the track tracking control of the wire-controlled chassis.
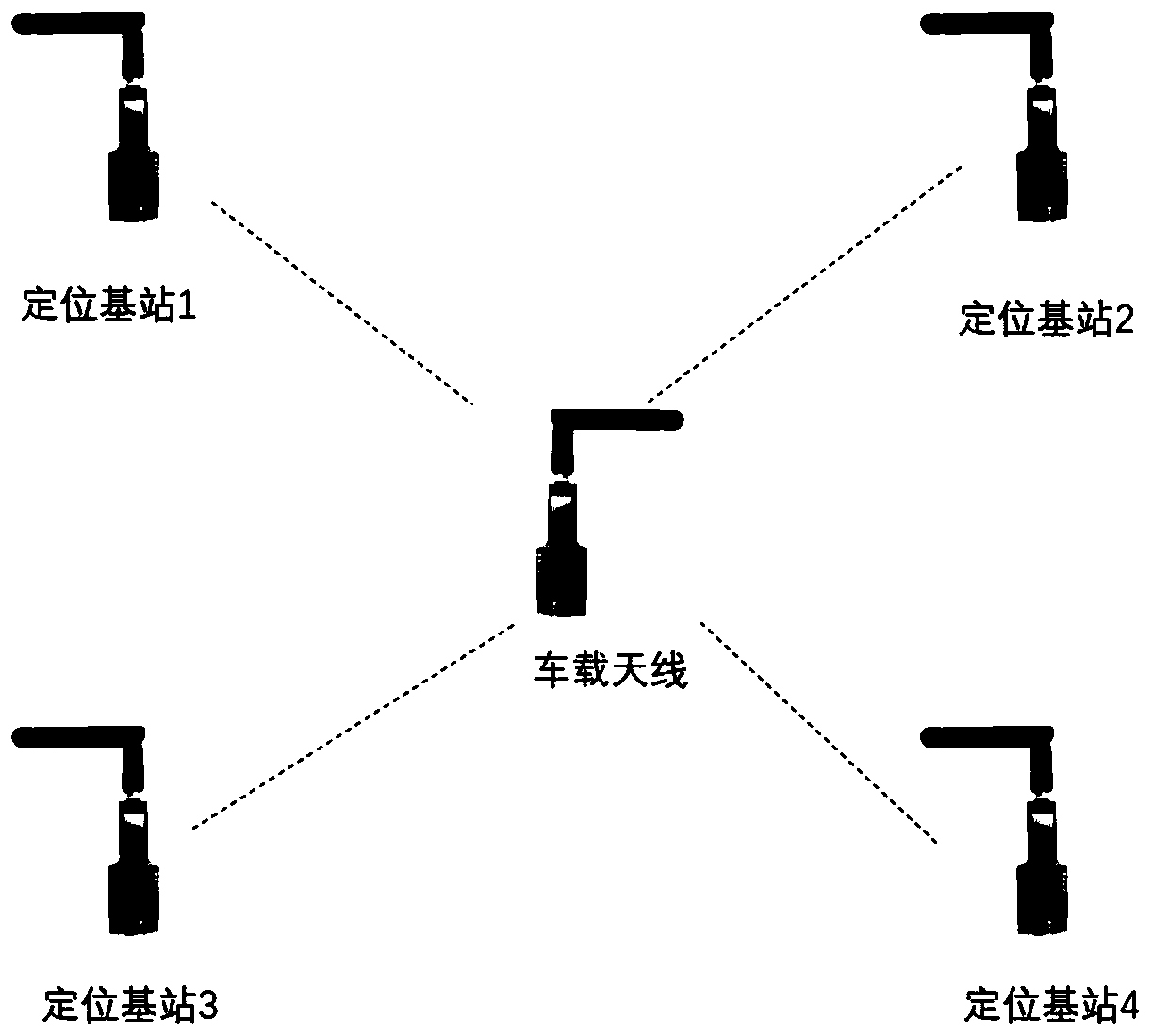
[0050] The invention provides a UWB positioning-based track tracking control system for a chassis controlled by wire, which includes a UWB positioning unit and a track tracking control unit;
[0051] UWB positioning unit: based on UWB positioning technology to obtain real-time vehicle positioning data, and use high-order perturbation filtering method to subtract the positioning data from the reference trajectory, and finally obtain the control amount at the current moment, including lateral position deviation and heading angle deviation;
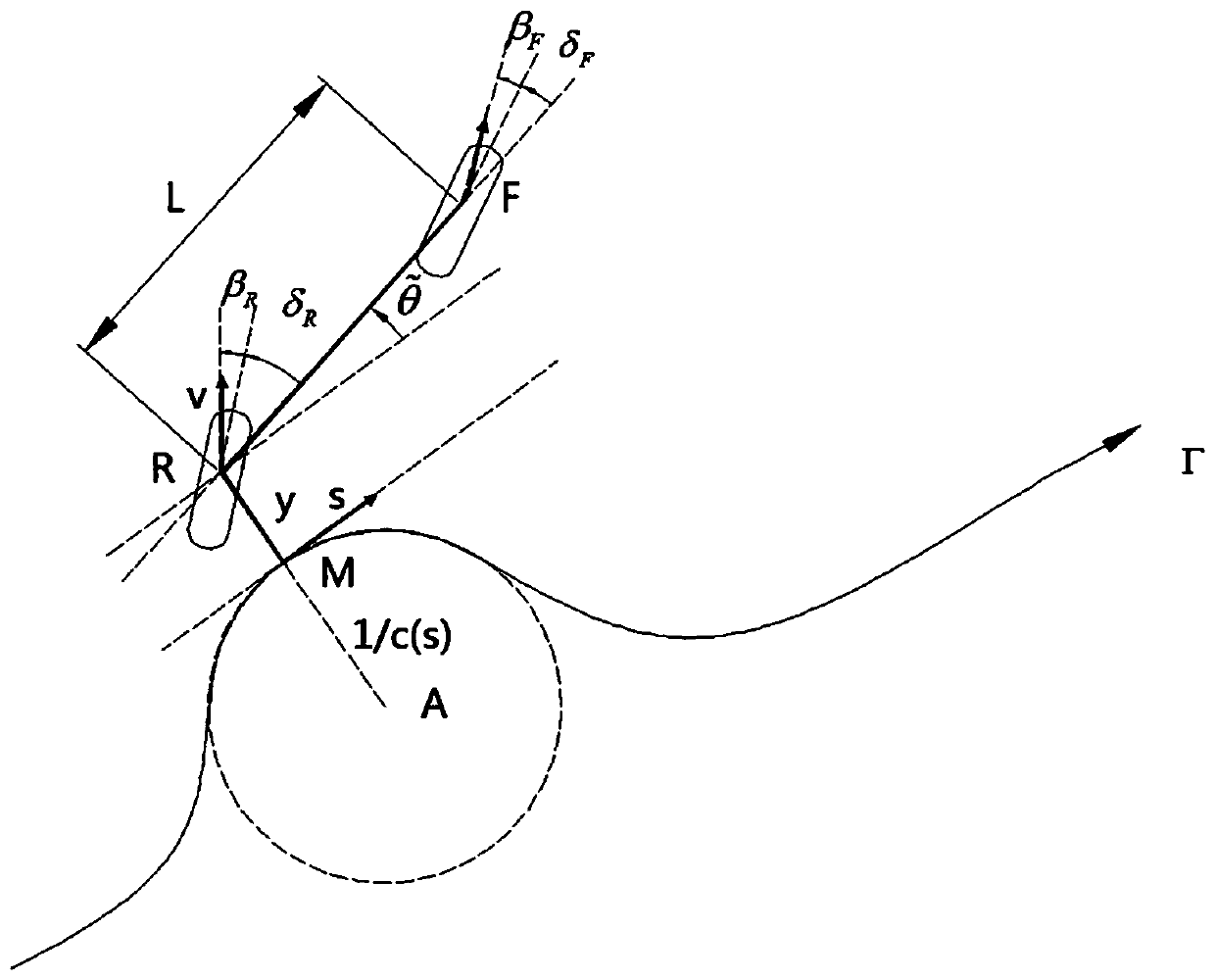
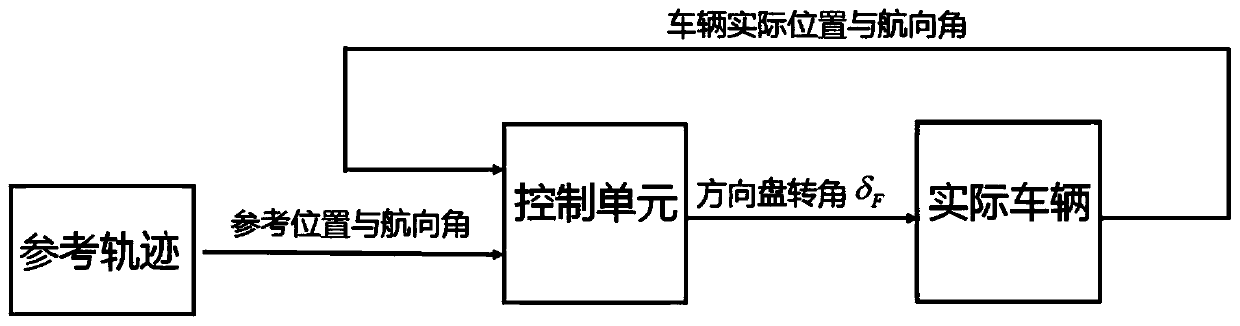
[0052] Trajectory tracking control unit: Calculate the wheel angle and driving torque according to the control quantity output by th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More