

Intersection expression and vehicle infrastructure target matching method for cooperative vehicle infrastructure system (CVIS) environment
An intersection and target matching technology, applied in the field of intersection expression and vehicle-road target matching in a vehicle-road collaborative environment, can solve the problems of algorithm accuracy, instability, large measurement data, etc. Small throughput, easy-to-achieve effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
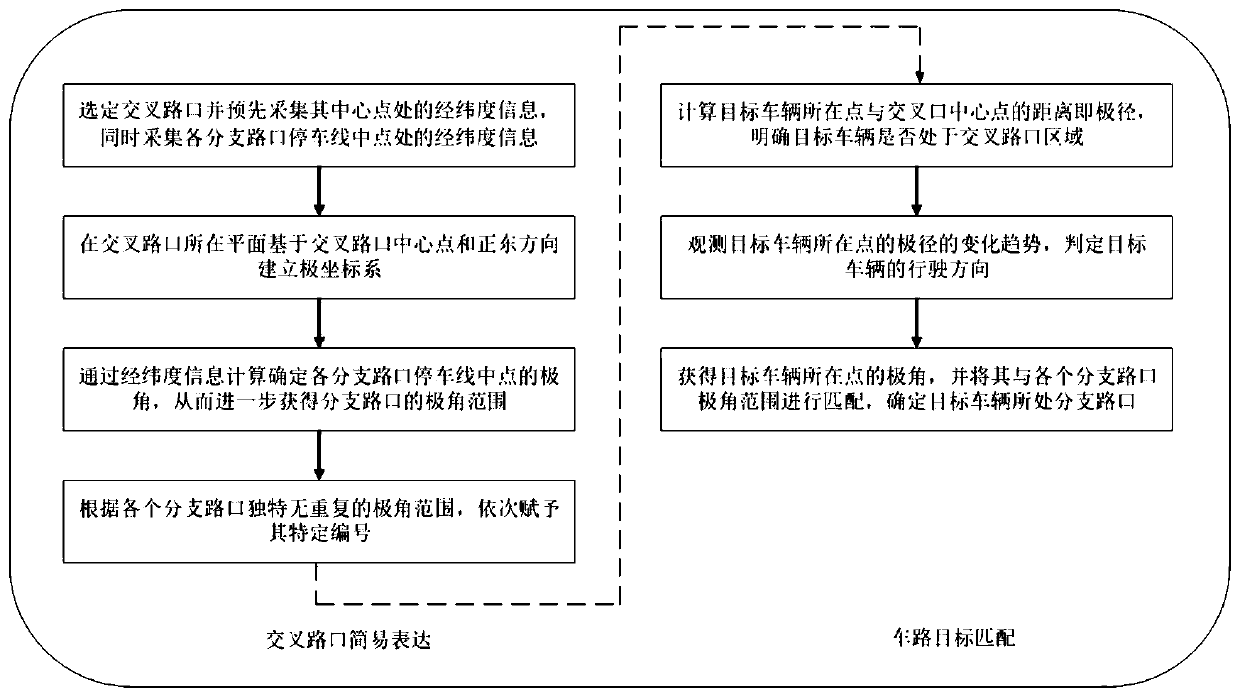
[0087] refer to Figure 4 , to complete the intersection expression and vehicle-road target matching in the vehicle-road collaborative environment, the specific steps are as follows:
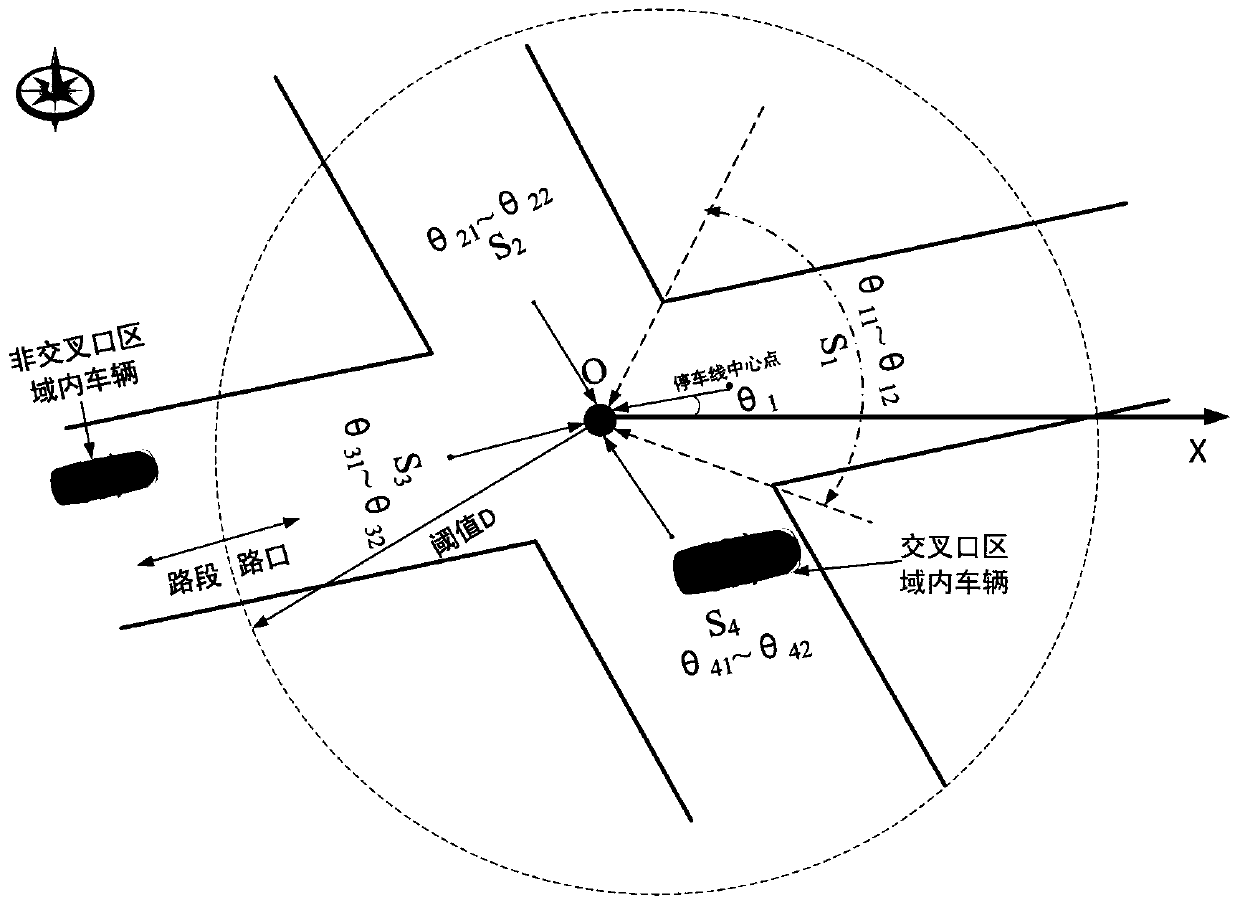
[0088] ① It is clear that the symmetrical intersection has four branch intersections, and the latitude and longitude information L at the center point O is collected O , BO and the latitude and longitude information L at the midpoint of the stop line at the four branch intersections i , B i ;
[0089] ② With the center point O as the pole and the due east direction as the polar axis direction, establish a polar coordinate system on the same plane as the intersection;
[0090] ③Measure the polar angles of the midpoints of the stop lines at the four branch intersections in the above polar coordinate system, and then obtain the polar angle ranges of the branch intersections, which are respectively denoted as θ 11 ~θ 12 , θ 21 ~θ 22 , θ 31 ~θ 32 , θ 41 ~θ 42 , and give each branch interse...
Embodiment 2
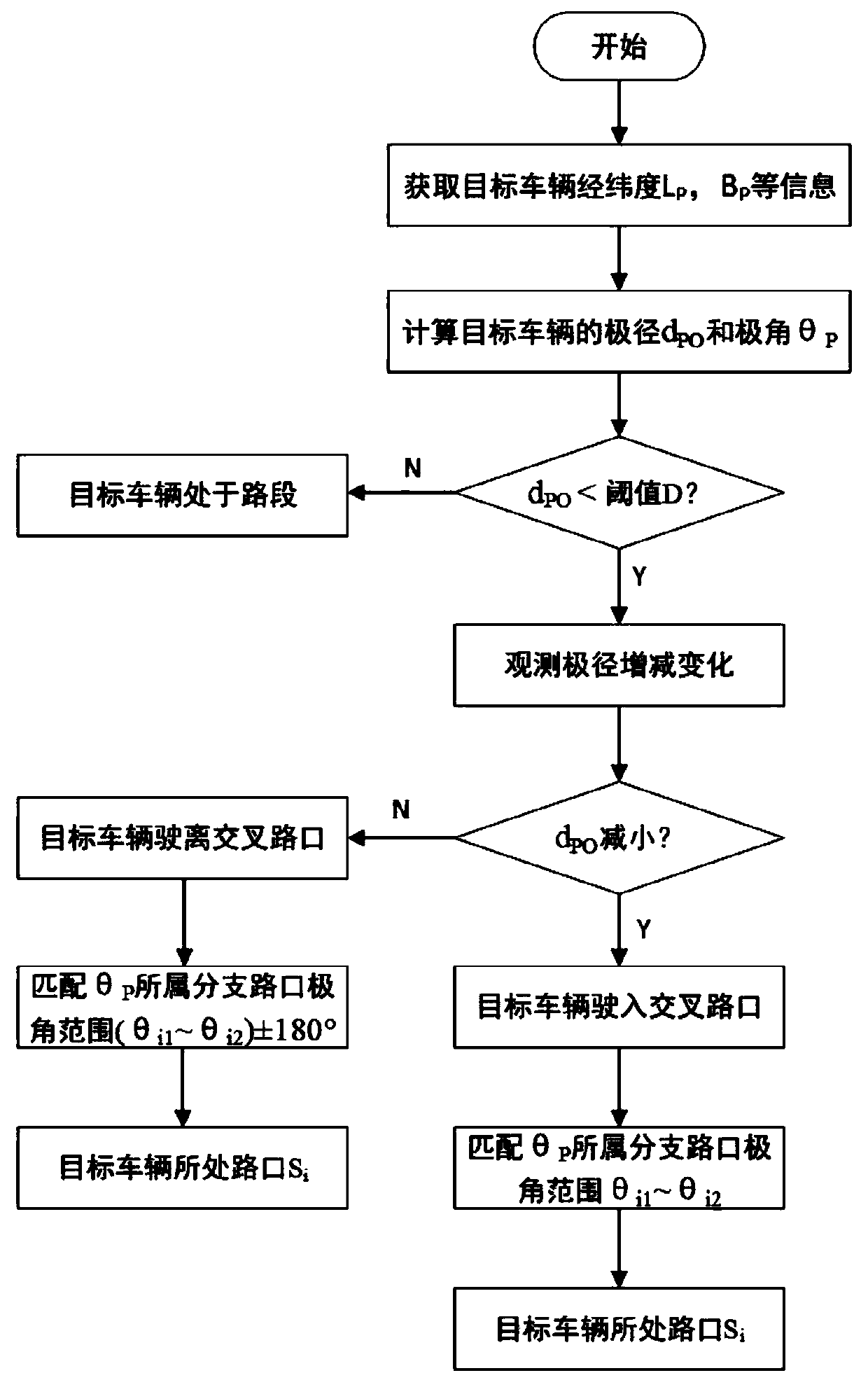
[0096] refer to Figure 5 , to complete the vehicle-road target matching at the intersection under the vehicle-road collaborative environment, the specific steps are as follows:
[0097] ① It is clear that the asymmetric intersection has three branch intersections, and the latitude and longitude information L at the center point O is collected O , B O , at the same time collect the latitude and longitude information of the midpoint of the parking line at each branch intersection;
[0098] ② With the center point O as the pole and the due east direction as the polar axis direction, establish a polar coordinate system on the same plane as the intersection;
[0099] ③Measure the polar angles of the midpoints of the stop lines at the three branch intersections in the above polar coordinate system, and then obtain the range of the polar angles of the branch intersections, denoted as θ 11 ~θ 12 , θ 21 ~θ 22 , θ 31 ~θ 32 , and give each branch intersection code S in sequence ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More