

A kind of assisting exoskeleton control method, control system and computer equipment
A control method and exoskeleton technology, applied in the direction of control/regulation system, program control manipulator, torque/mechanical power control, etc., can solve the problems of insufficient recognition of gait events and wearing experience, and achieve a small amount of information processing and use Simple, avoid the effect of consumables
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] Next, the technical solutions in the embodiments of the present invention will be described in conjunction with the drawings of the embodiments of the present invention, and it is clear that the described embodiments are intended to be in an embodiment of the invention, not all of the embodiments. Based on the embodiments in the present invention, all other embodiments obtained without creative labor are not made in the premise of creative labor.
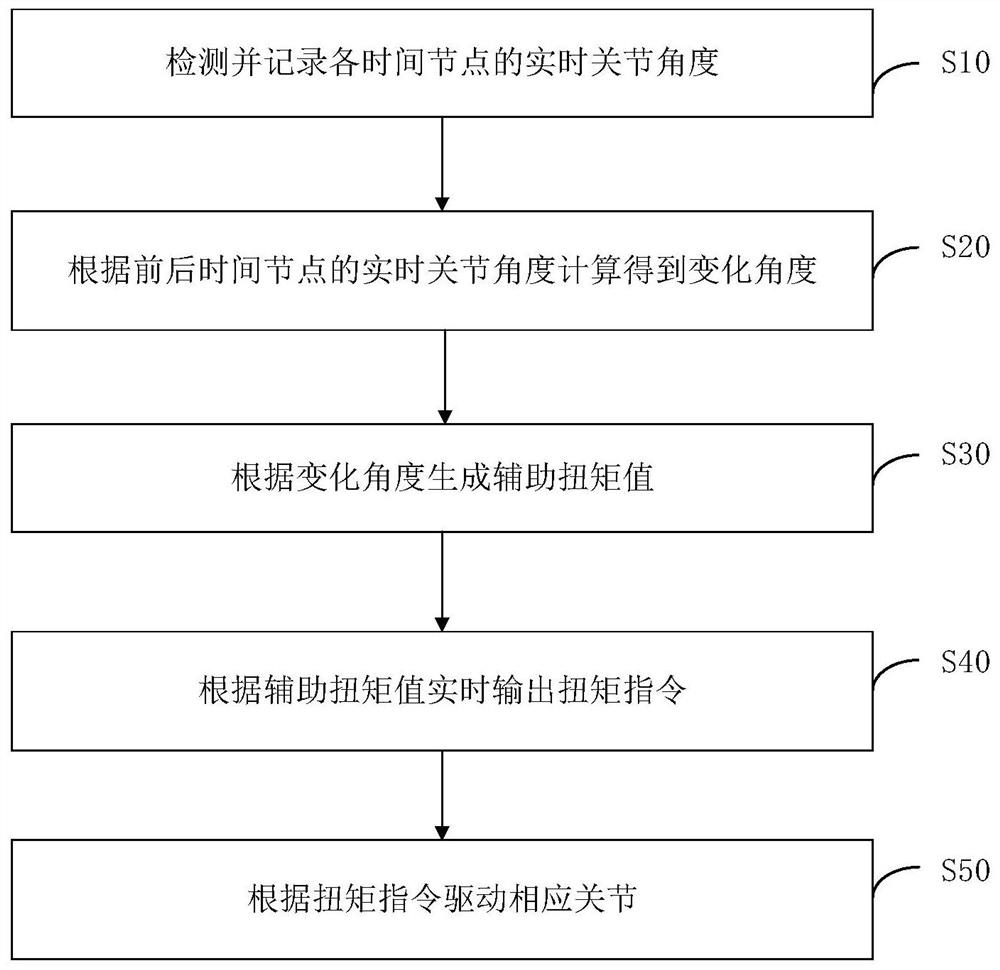
[0049] The bokelet control method provided by the embodiment of the present invention, in the outer skeleton used by the customer, the outer skeleton is measured, recorded by the data of the user real-time joint angle, records, drive the joint according to the calculation of the auxiliary torque, and transmits the data to the customer End, the client communicates with the outer skeleton via the network. Clients can but are not limited to various personal computers, laptops, smartphones, tablets, and portable wearable devices.
[00...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More