

Track type inspection robot walking mechanism
A technology of inspection robot and walking mechanism, which is applied in the field of inspection robot, can solve the complex problems of orbital inspection robot, and achieve the effect of low space occupation rate, less space occupation and high work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] In order to better explain the present invention and facilitate understanding, the present invention will be described in detail below through specific embodiments in conjunction with the accompanying drawings.
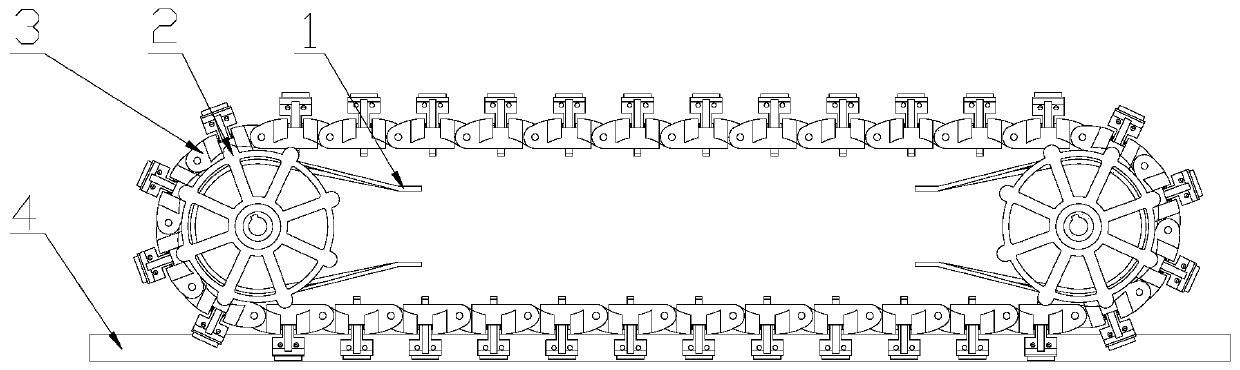
[0028] Such as figure 1 As shown, the present invention provides a track-type inspection robot walking mechanism, including a support plate 1, at least two wheels 2, and a plurality of crawling claws 3, and a chain transmission mechanism is formed by connecting a plurality of crawling claws 3 end to end. , in this embodiment, a plurality of crawling wheel claws 3 are connected end to end to form a 400-meter runway shape. In actual application, an appropriate connection shape, such as a triangle or a rectangle, can be selected according to the characteristics of the actual robot. The support plate 1 is U-shaped with a small top and a large bottom. The support plate 1 and the wheel disc 2 are fixed on the robot. The bottom of the support plate 1 is in contact wit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More