

Mechanical arm remote simulation control system
A robotic arm and control system technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of lack of flexibility in system control, poor scalability, and difficult maintenance, and achieve the effect of improving the flexibility and accuracy of movements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
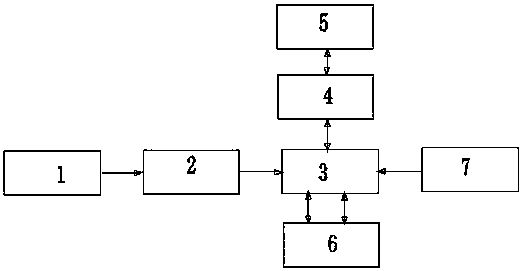
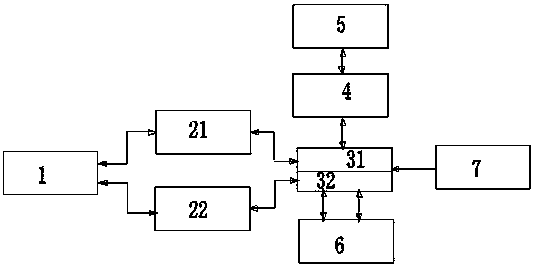
[0016] The remote imitation control system of the mechanical arm includes a mechanical arm, an activity sensor, and a controller device. The start switch connected by the controller device is arranged on the robot arm. The remote imitation controller and data memory are arranged in the controller device. switch, the remote imitation controller starts to operate, the remote imitation controller receives the remote action signal, sends it to the controller device for comprehensive processing, converts it into action data and stores it in the data storage, and the data in the data storage can be copied and transmitted. The controller device copies and extracts the action data stored in the data memory, and performs data processing and conversion on the action data. The action data is converted into an action command signal, and the action command is sent to the mechanical arm through the activity sensor, and the mechanical arm receives the action. After the command signal, make an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More