

An action imitation method, an action imitation device, and a terminal device
A technology of actions and key points, applied in the direction of program control manipulators, manufacturing tools, manipulators, etc., can solve problems such as increasing the burden of manual work, and achieve the effect of simplifying the burden of programming
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
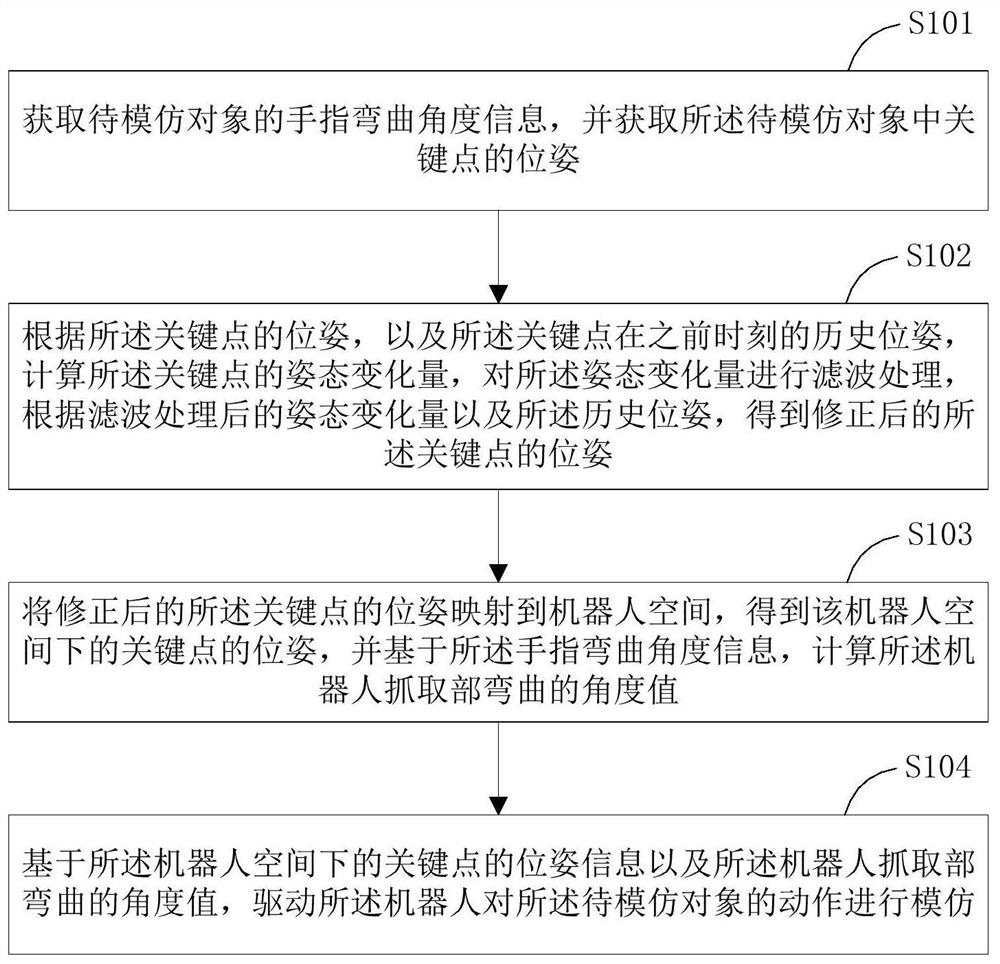
[0033] The following describes an action imitation method provided in Embodiment 1 of this application, please refer to the attached figure 1 , the action imitation method includes:
[0034] In step S101, the finger bending angle information of the object to be imitated is obtained, and the pose of key points in the object to be imitated is obtained;
[0035] In the first embodiment of the present application, in order to simplify the programming burden on the robot, it is necessary to obtain the motion of the object to be imitated in advance, that is, to obtain the finger bending angle information of the object to be imitated (for example, a person), and the object to be imitated. The key point of the posture.
[0036] At present, there are many different types of motion capture systems in the prior art, which can collect the poses of key points in the object to be imitated. For example, the prior art provides mechanical motion capture systems, acoustic motion capture system...
Embodiment 2
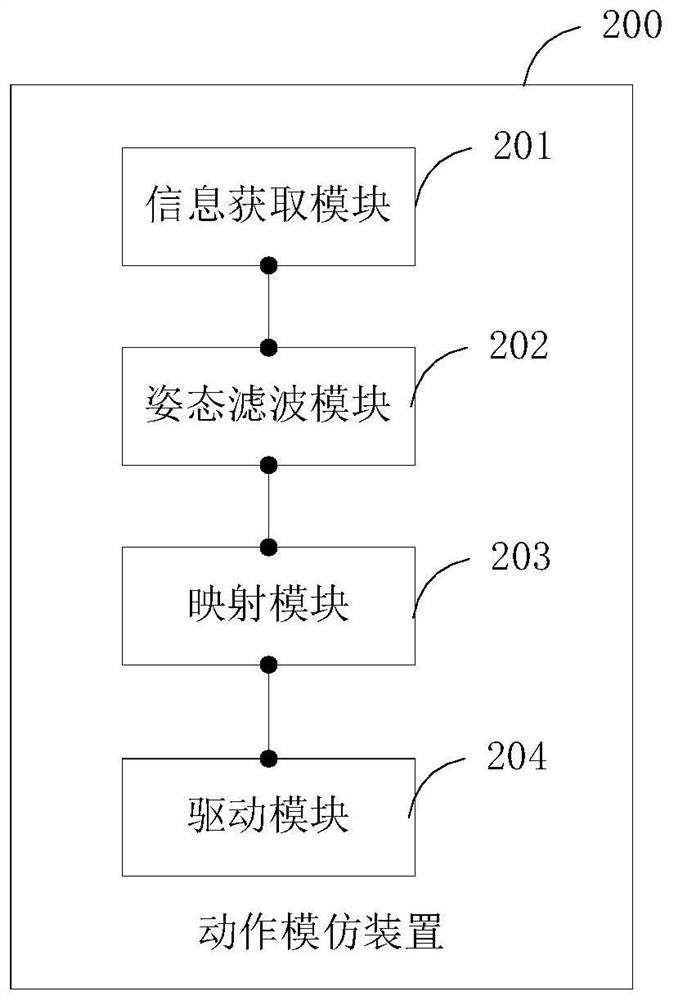
[0079] Embodiment 2 of the present application provides an action imitation device, such as figure 2 As shown, the simulation device 200 includes:
[0080] An information acquisition module 201, configured to acquire finger bending angle information of the object to be imitated, and obtain the pose of key points in the object to be imitated;
[0081] The attitude filtering module 202 is used to calculate the attitude change of the key point according to the pose of the key point and the historical pose of the key point at the previous moment, and perform filtering processing on the attitude change, according to Filtering the attitude variation and the historical pose to obtain the corrected pose of the key point;
[0082] The mapping module 203 is configured to map the corrected poses of the key points to the robot space, obtain the poses of the key points in the robot space, and calculate the grasping position of the robot based on the bending angle information of the finge...
Embodiment 3
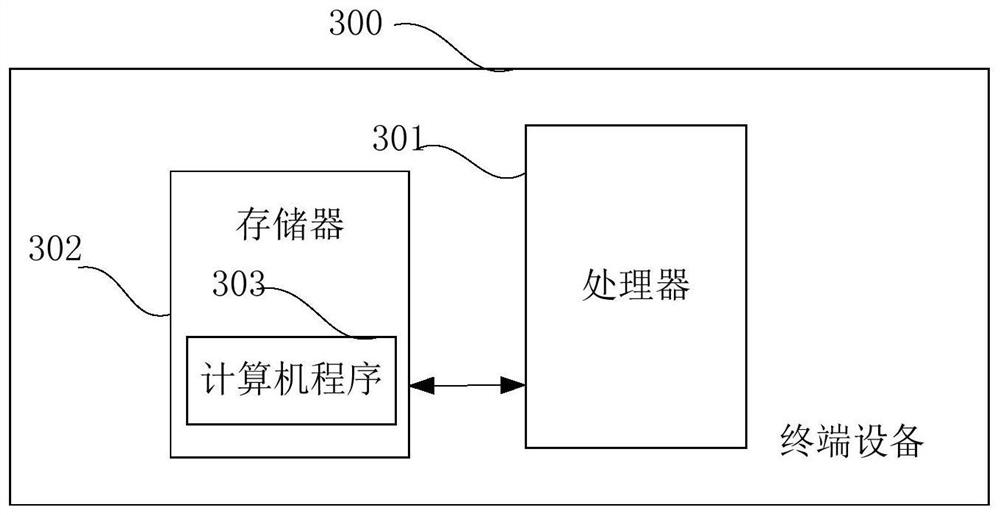
[0108] image 3 It is a schematic diagram of a terminal device provided in Embodiment 3 of the present application. Such as image 3 As shown, the terminal device 300 in this embodiment includes: a processor 301 , a memory 302 , and a computer program 303 stored in the memory 302 and operable on the processor 301 . The steps in the foregoing method embodiments are implemented when the foregoing processor 301 executes the foregoing computer program 303 . Alternatively, when the processor 301 executes the computer program 303, the functions of the modules / units in the above device embodiments are realized.
[0109] Exemplarily, the above-mentioned computer program 303 may be divided into one or more modules / units, and the above-mentioned one or more modules / units are stored in the above-mentioned memory 302 and executed by the above-mentioned processor 301 to complete the present application. The above-mentioned one or more modules / units may be a series of computer program in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More