

Multi-robot path planning method based on ant colony algorithm
A multi-robot, path planning technology, applied in the direction of instruments, road network navigators, measuring devices, etc., can solve the problems of limited environmental information, small robot field of view, difficult to obtain the global optimal path, etc., to achieve good optimization accuracy and stability. high sex effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific example
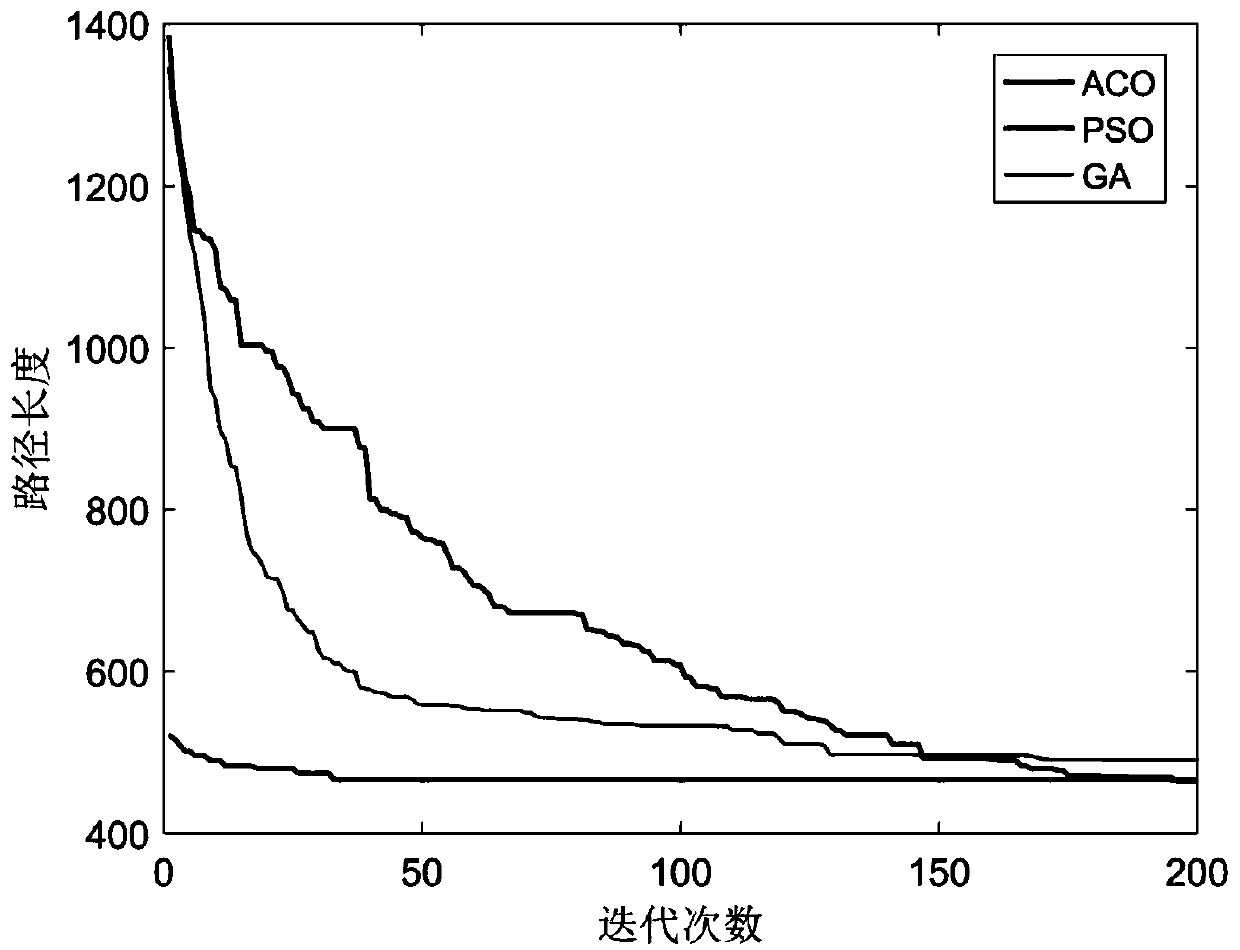
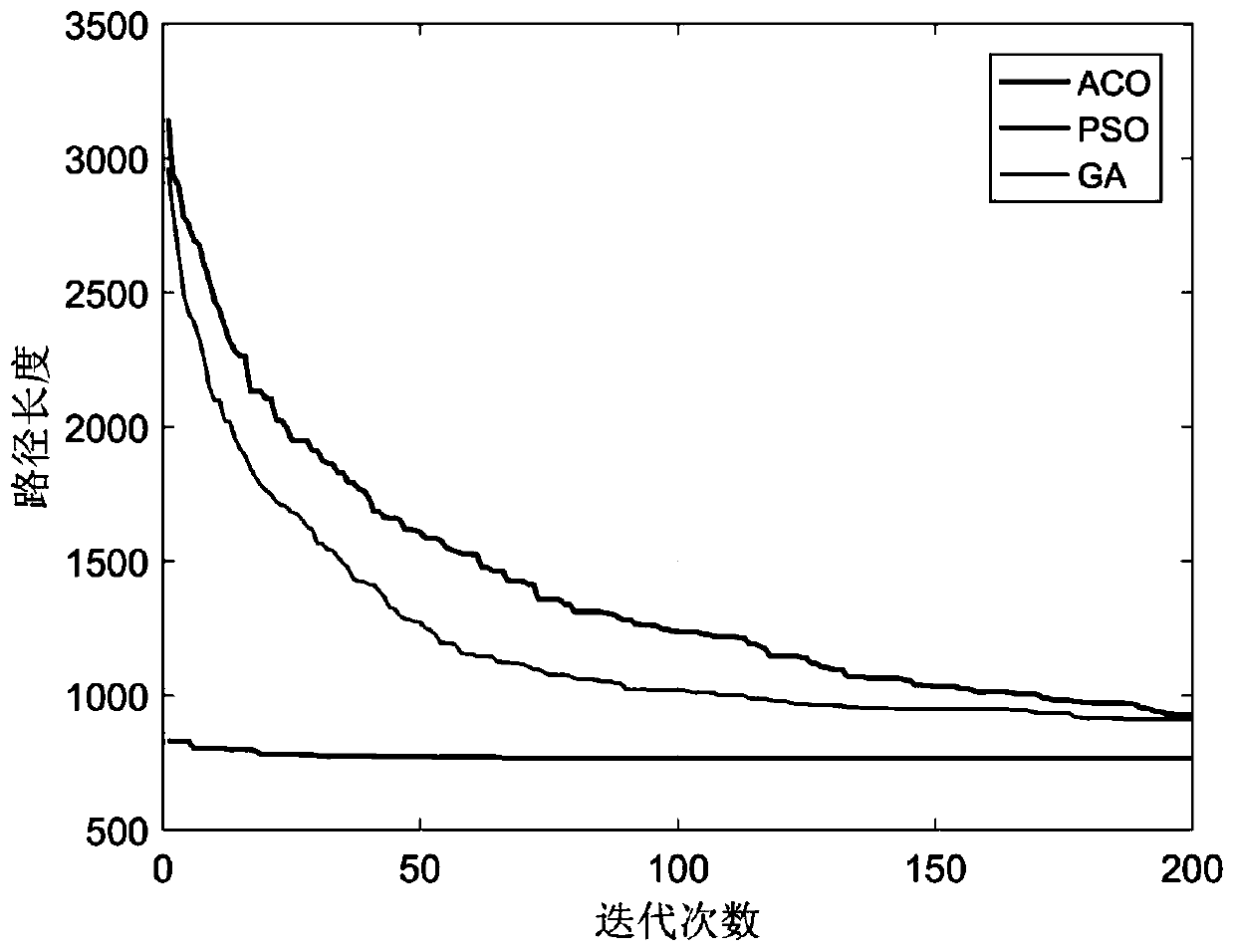
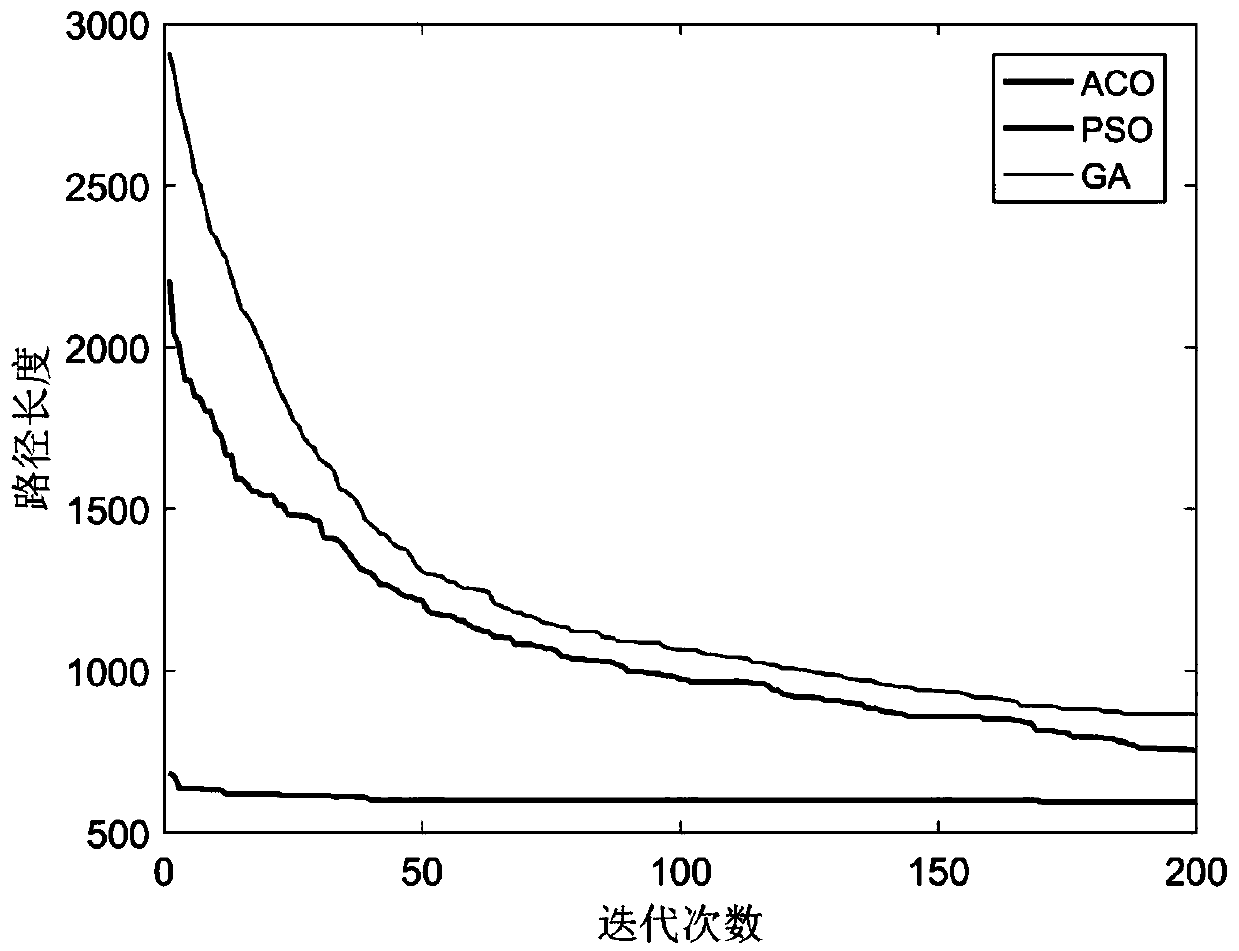
[0046] Use five sets of data in TSPLIB, eil51, st70, eil76, eil101, and tsp225, as the data set, and regard the position coordinates of tasks in each set of data sets as the positions of different tasks, and set three robots to start from the positions of the first three tasks without repeating After executing all tasks, return to the starting task position. The optimization goal is the shortest sum of all robot walking paths. The parameter settings of the comparison algorithm are shown in Table 1.
[0047] Table 1 Algorithm parameter settings
[0048]
[0049] Because the population size of ant colony algorithm, particle swarm optimization algorithm and genetic algorithm is 500, and each algorithm also generates 500 new solutions in each iteration. So when the number of iterations is the same, the number of evaluations is the same. Therefore, in this section, the termination conditions of the three comparison algorithms are set to exit the iteration and output the optimal...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More