Ballistic robot system with spin and other controlled motion of robot during flight
A robot system and robot technology, applied in the direction of robots, control/regulation systems, instruments, etc., can solve problems such as not being able to provide joint motion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
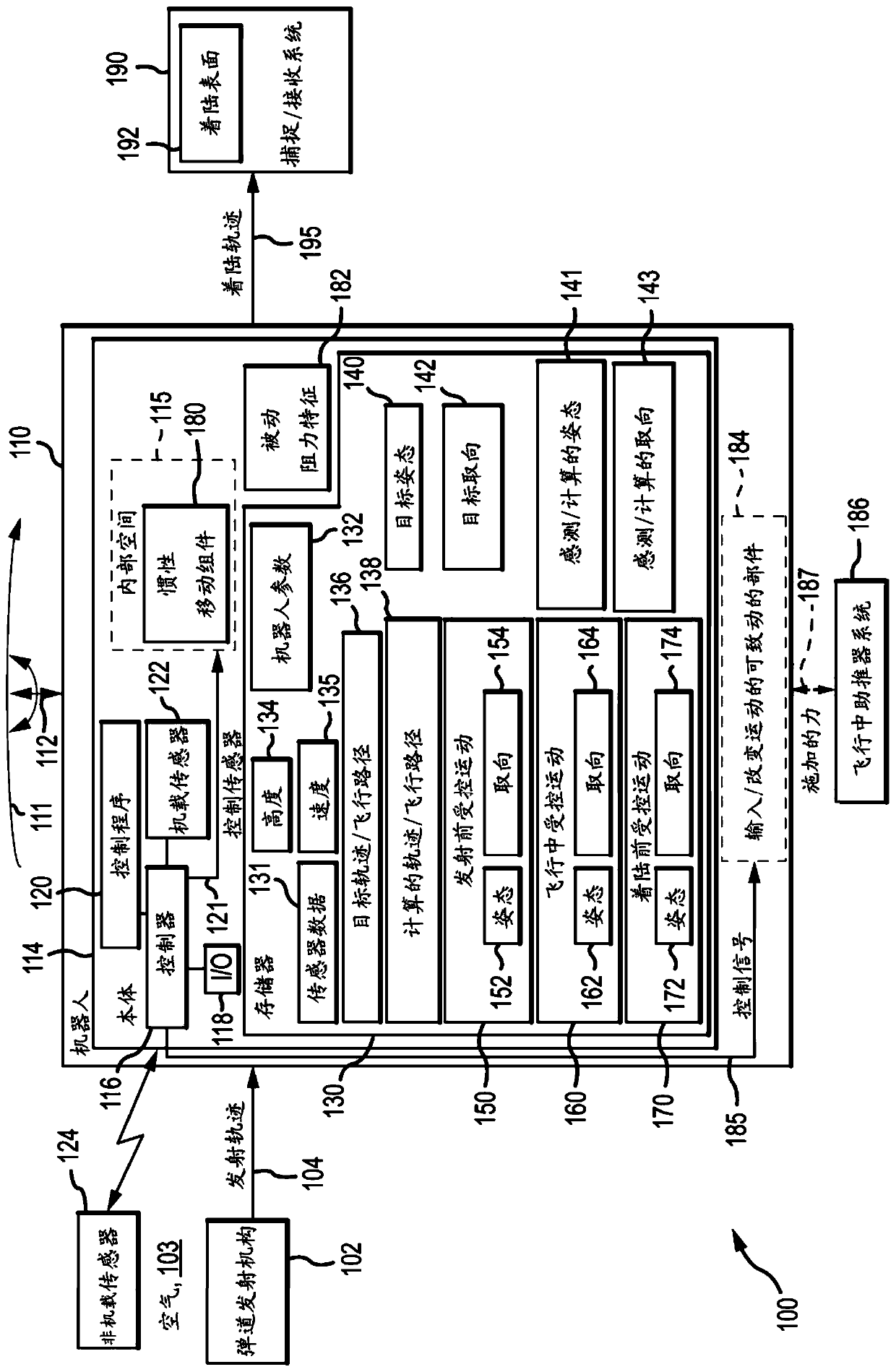
[0036] The inventors have recognized that there are many scenarios where it may be desirable to provide "stunt" robots or animatronic devices that can be used in place of real actors or performers to provide the performance or entertainment of flying characters performing acrobatic maneuvers in mid-air. To this end, the present invention contemplates a ballistic robot system (and corresponding control methods for providing ballistic animatronics or "acrobatics" or "stunts"), which generally includes a ballistic launch mechanism for launching the robot into the air with a trajectory (or onto the flight path). The robot includes an on-board motion control system for providing actuated motion / movement, either entirely internal, e.g. with inertial motion components and / or with externally visible motion, e.g. by operating one or more actuatable joints or components (e.g., moving the robot body to a folded pose and back to a planar / linear pose and / or moving one or more legs and / or a...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap