

Flexible control method for mechanical arm based on dynamics
A control method and technology of a robotic arm, applied in the field of dynamics, can solve the problems of high data processing capability and complex joint torque formula, and achieve the effect of reducing the pressure of real-time calculation and the simple torque formula
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific embodiments.
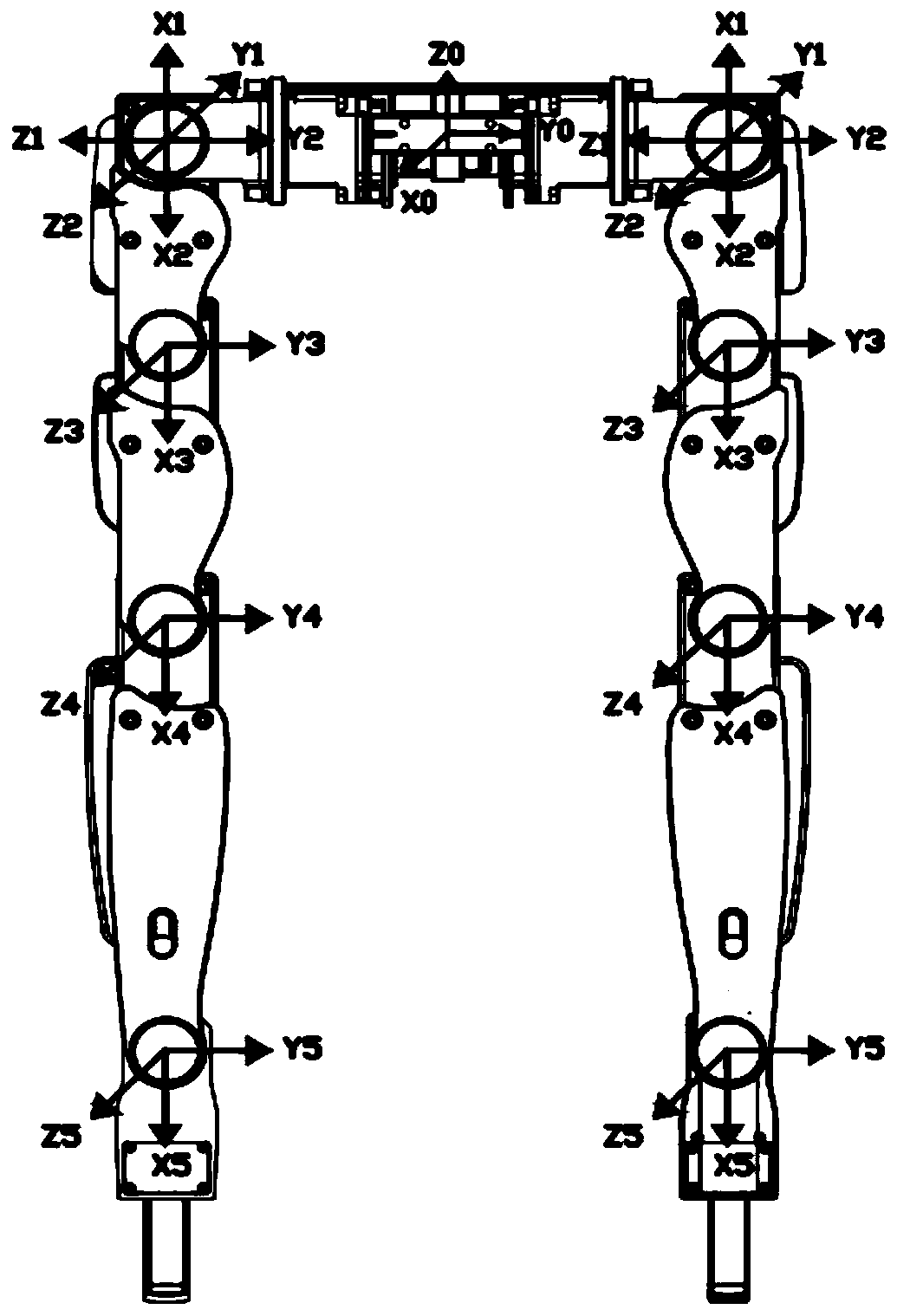
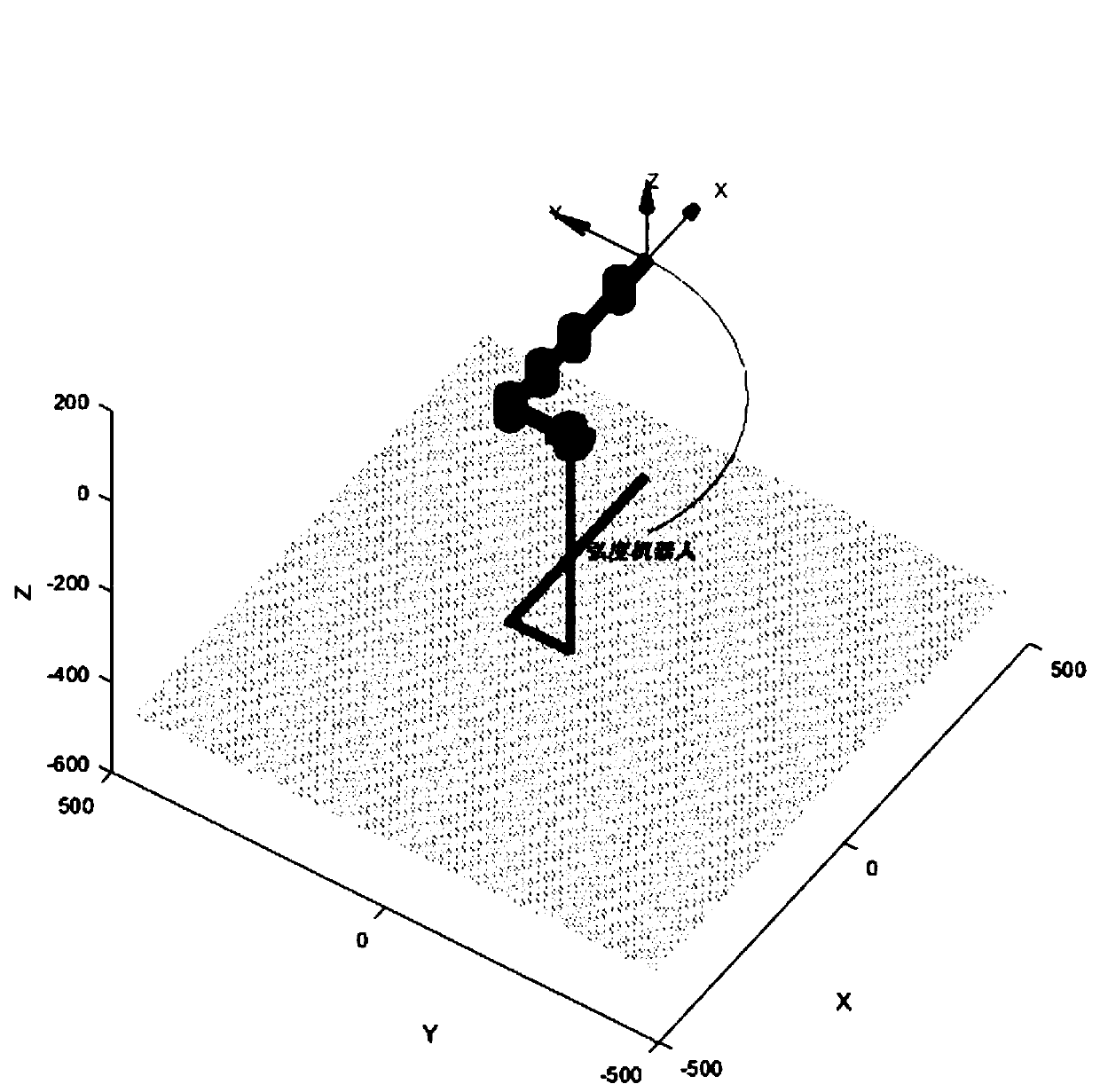
[0042] Such as Figure 1-4 As shown, the present invention provides a dynamics-based flexible control method for a manipulator. First, the generalized D-H method is used for kinematics modeling; The pose transformation matrix of the system is T i (θ i )(i=1,2,3.4,5), so the attitude transformation matrix is
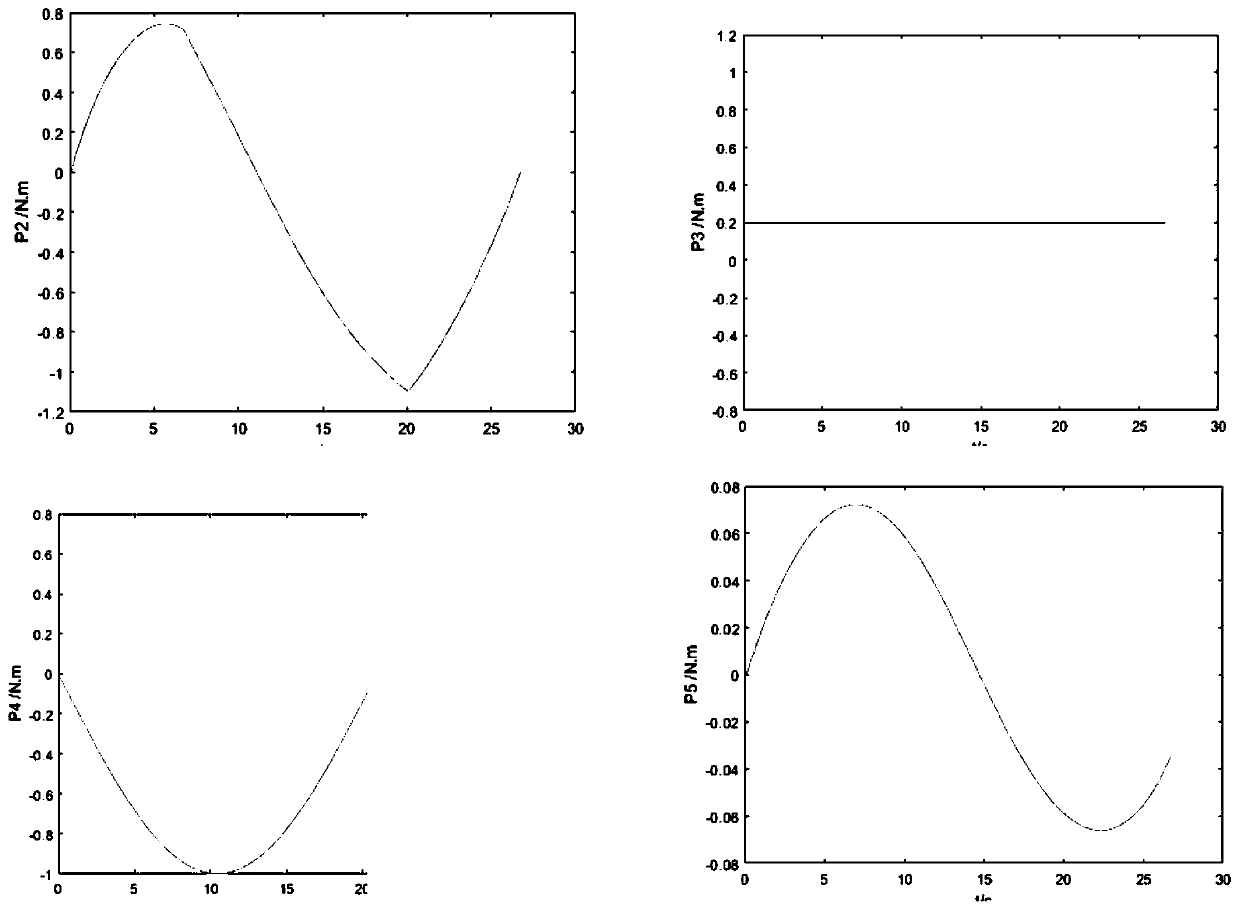
[0043] Then use the Newton-Euler formula to model the dynamics of the model;
[0044] 1) Recursively push outward from the base of the manipulator to find the expression of the velocity, acceleration, inertial force and inertial moment of each joint in the current joint coordinate system, as follows:
[0045] First find the velocity w at each joint i , acceleration and the acceleration at the center of mass
[0046]
[0047] Find...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More