

A Self-Growing Soft Robot Top Carrying Camera Device
A robotic, self-growing technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as troublesome detection tasks
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
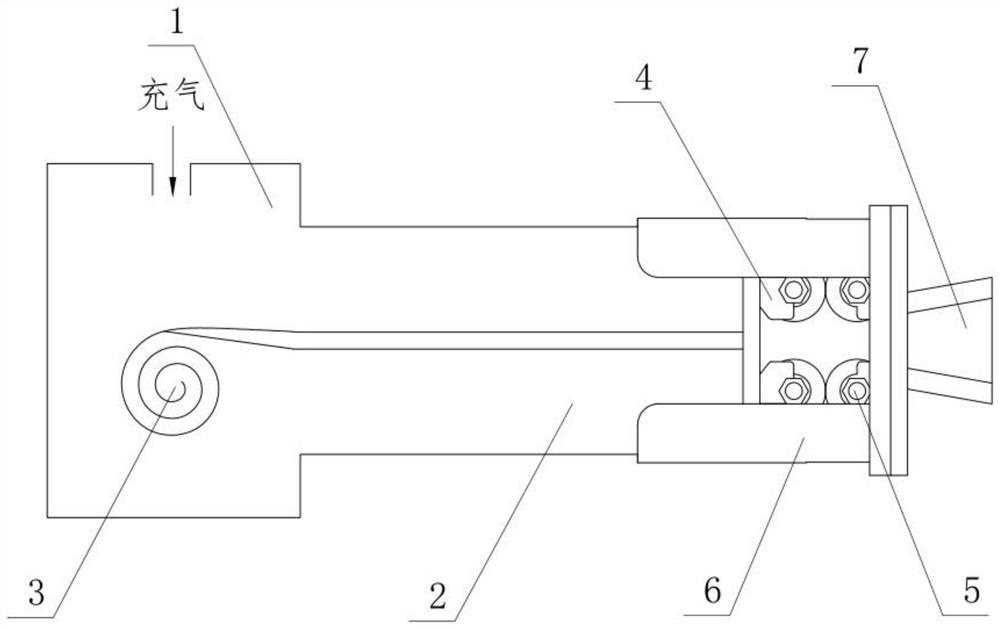
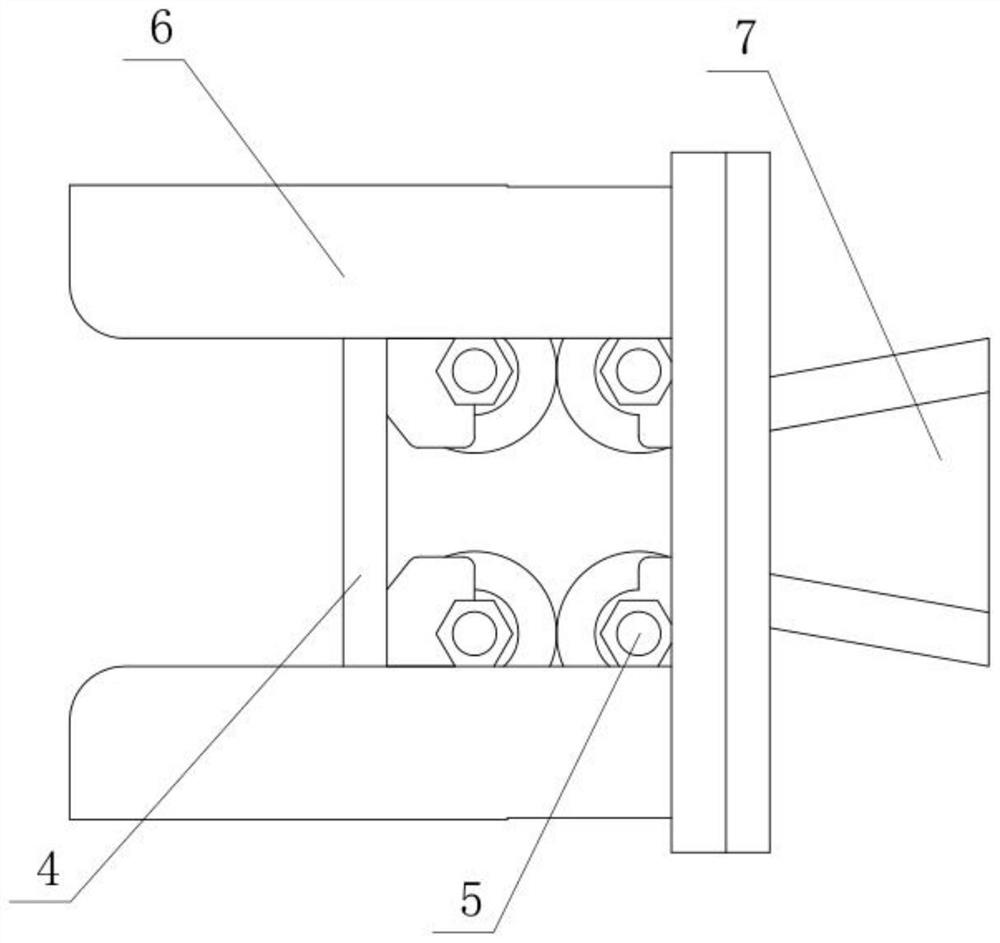
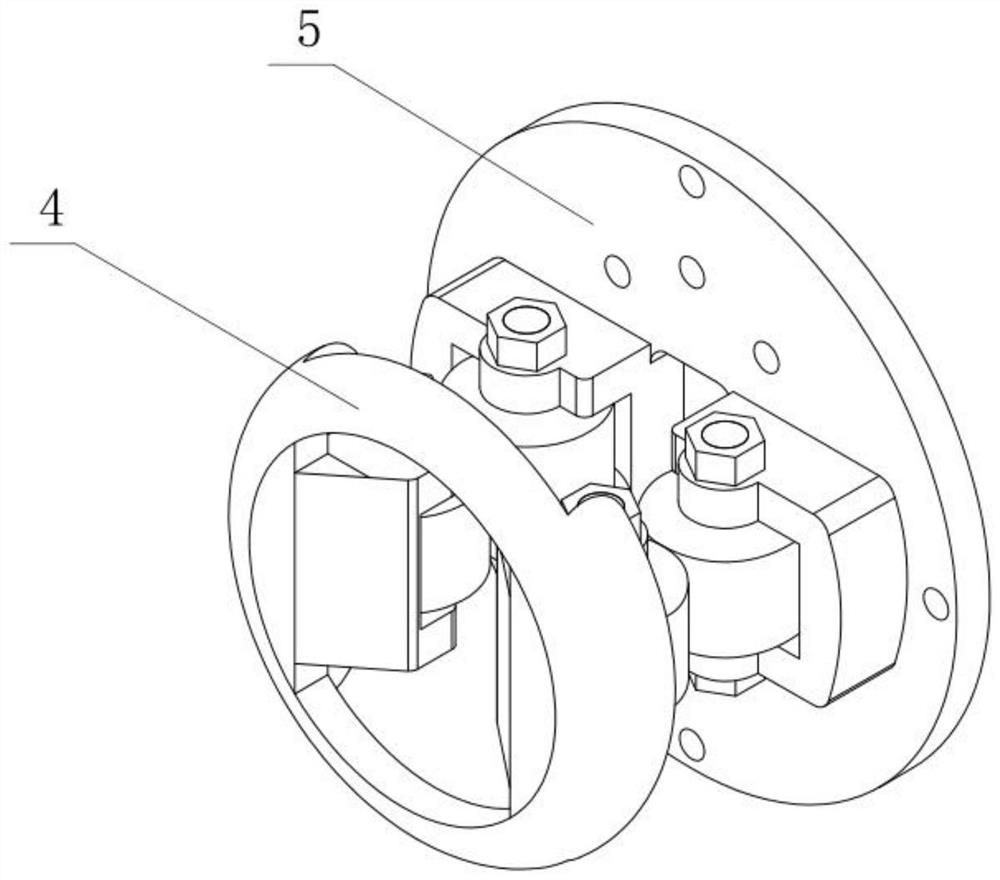
[0023] Combine below Figure 1-6 Describe this embodiment, a self-growing soft robot tip-carrying camera device, including a box body 1, a soft robot extension body 2, a storage reel 3 for the soft robot body, a magnetic inner top cover 4, a magnetic outer top cover 5, a restraint The cylinder 6 and the wireless camera 7 are moved sideways, and the box body 1 is provided with an elongated main body 2 of the soft robot that expands forward through ventilation, and the inner spiral of the extended main body 2 of the soft robot is stored in the storage reel 3 of the main body of the soft robot , the front end of the magnetic internal top cover 4 is magnetically attracted to the magnetic external top cover 5, the front end of the elongated main body 2 of the soft robot is connected between the magnetic internal top cover 4 and the magnetic external top cover 5, and the rear end of the magnetic external top cover 5 Connected with a constrained side-moving cylinder 6, the constraine...
specific Embodiment approach 2
[0025] Combine below Figure 1-6 This embodiment will be described. This embodiment will further describe the first embodiment. The box body 1 is provided with an air pump that controls the intake air volume according to the feedback information. The two are sealed and connected to prevent air leakage and cause control deviation; when the air pump increases the air pressure, the internal pressure of the elongated main body 2 of the soft robot increases, making the main body stored in the storage reel 3 of the main body of the soft robot turn outward and grow forward , to achieve the effect of self-growth.
specific Embodiment approach 3
[0027] Combine below Figure 1-6 This embodiment will be described. This embodiment will further describe the first embodiment. The elongated body 2 of the soft robot is made of a PE tubular material.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More