

Autonomous berthing method and device for unmanned surface vehicle, and unmanned surface vehicle
An unmanned boat and track technology, which is applied in two-dimensional position/channel control, vehicle position/route/altitude control, instruments and other directions, can solve the problem of not considering the timely control of unmanned boats, the complex process and difficult realization, and the realization cost. Advanced problems, to achieve the effect of lowering the technical threshold, ensuring stability and security, and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
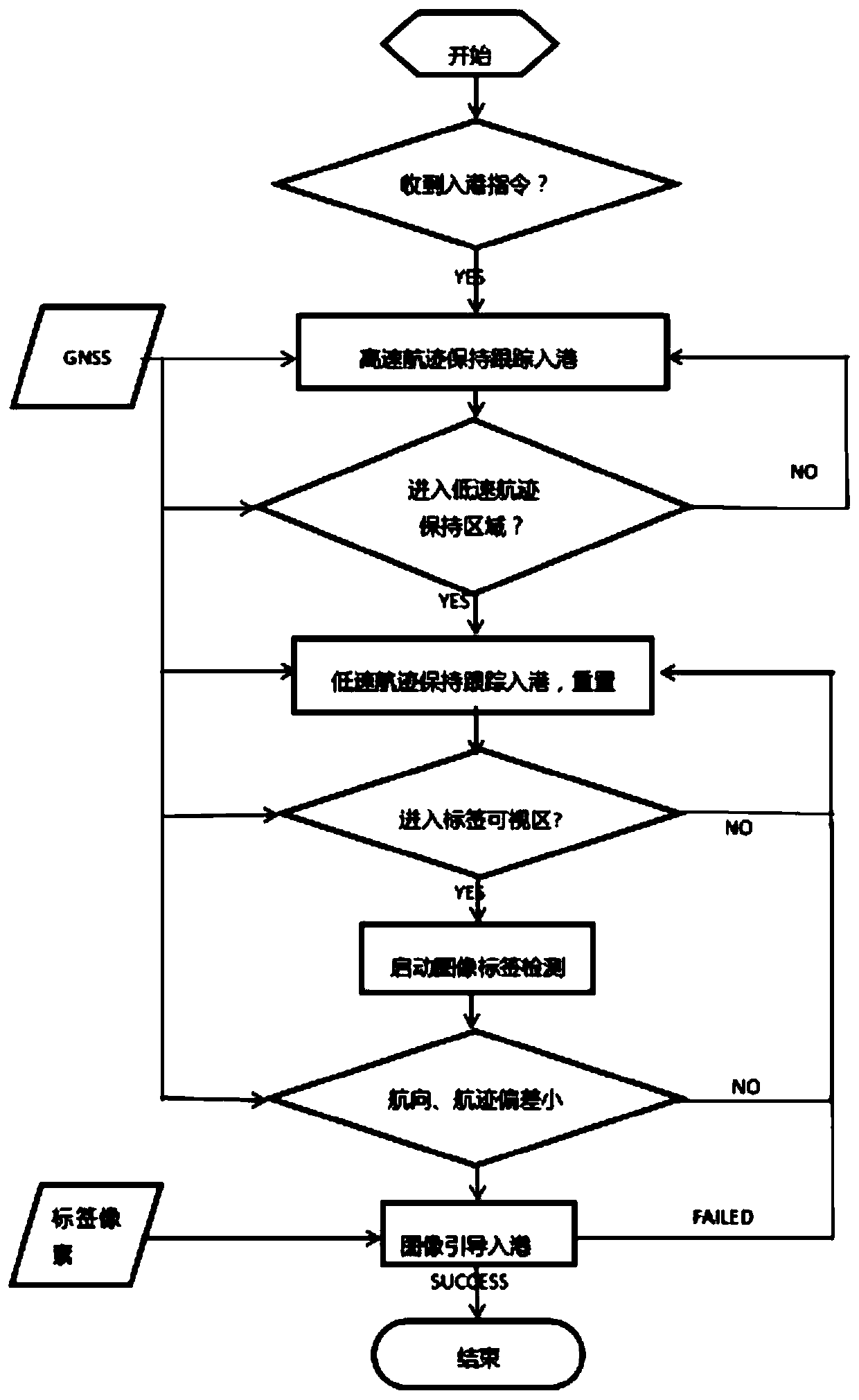
[0046]The embodiment of the present invention provides a method for self-parking of an unmanned boat, such as figure 1 As shown, the method may include a GNSS global guidance process and a label pixel guidance process, wherein:
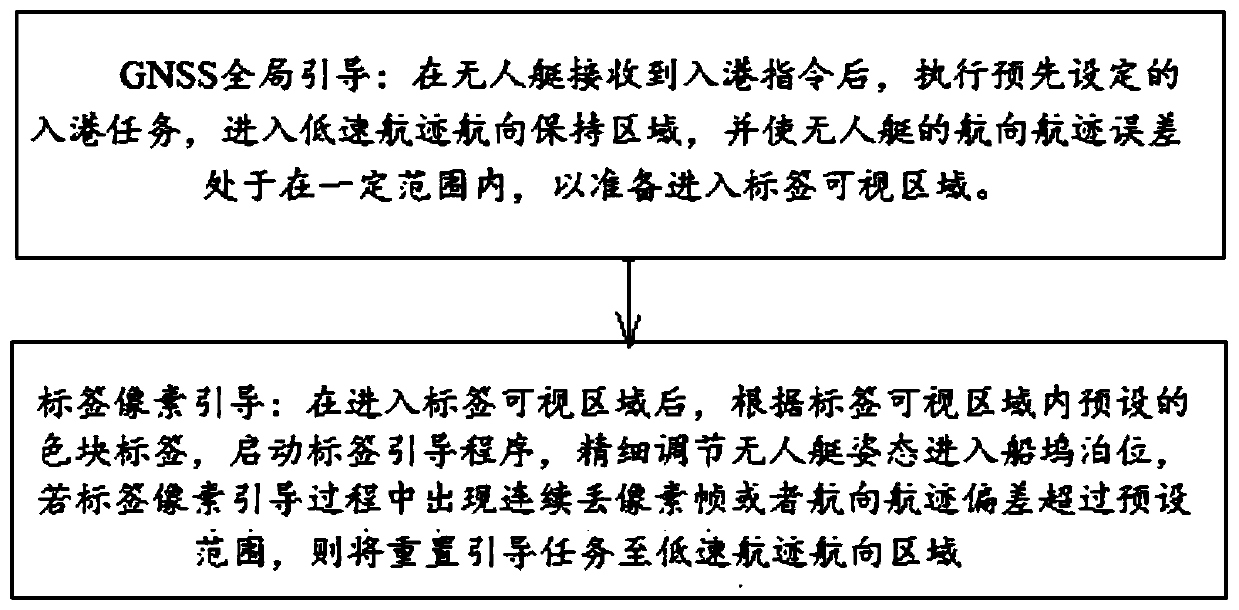
[0047] GNSS global guidance: After the unmanned boat receives the entry command, it executes the preset entry task, enters the low-speed track course keeping area, and keeps the course track error of the unmanned boat within a certain range to prepare for entering the label viewable area.
[0048] Specifically, GNSS global guidance may include two phases: a high-speed track heading maintenance phase and a low-speed track heading maintenance phase. In the high-speed track course maintenance stage, after receiving the entry command, the unmanned boat will perform the high-speed return mission according to the berth position and the entrance direction until it enters the low-speed track course maintenance area. Here, the port entry command is used to in...
Embodiment 2
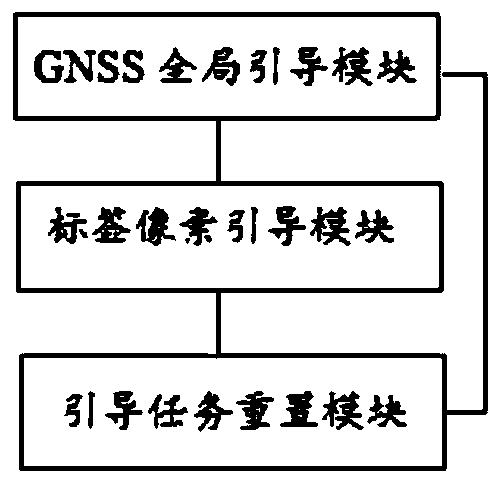
[0079] An embodiment of the present invention provides an autonomous docking device for unmanned boats, such as image 3 As shown, the device includes:
[0080] The GNSS global guidance module is used to execute the pre-set port entry task after the unmanned boat receives the entry command, enter the low-speed track course keeping area, and keep the course track error of the unmanned boat within a certain range, so as to Prepare to enter the visible area of the label;
[0081] The label pixel guidance module is used to start the label guidance program according to the preset color block label in the label visible area after entering the label visible area, and finely adjust the posture of the unmanned boat to enter the dock berth;
[0082] The guidance task reset module is used to reset the guidance task to the low-speed track course keeping area if there is a continuous loss of pixel frames or the course track deviation exceeds the preset range during the label pixel guida...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More