

A position-adjustable manipulator suction cup device
An adjustable, manipulator technology, applied in the direction of manipulators, manufacturing tools, chucks, etc., can solve the problems that affect the efficiency of butt joint connection, difficult to realize glue injection operation, and affect the stability of connection, so as to improve the docking ability and ensure the adsorption capacity of the suction cup , the effect of simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
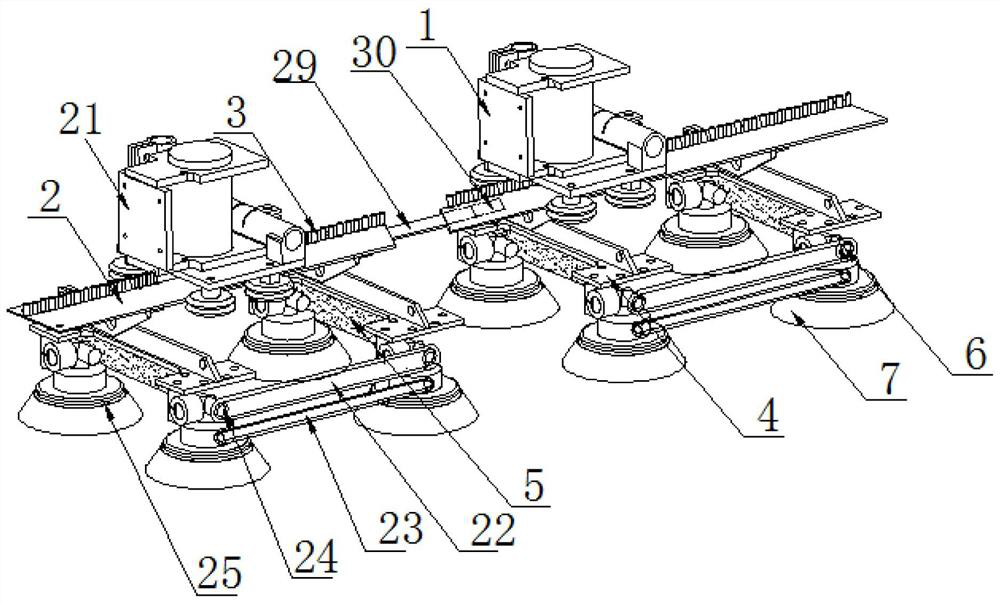
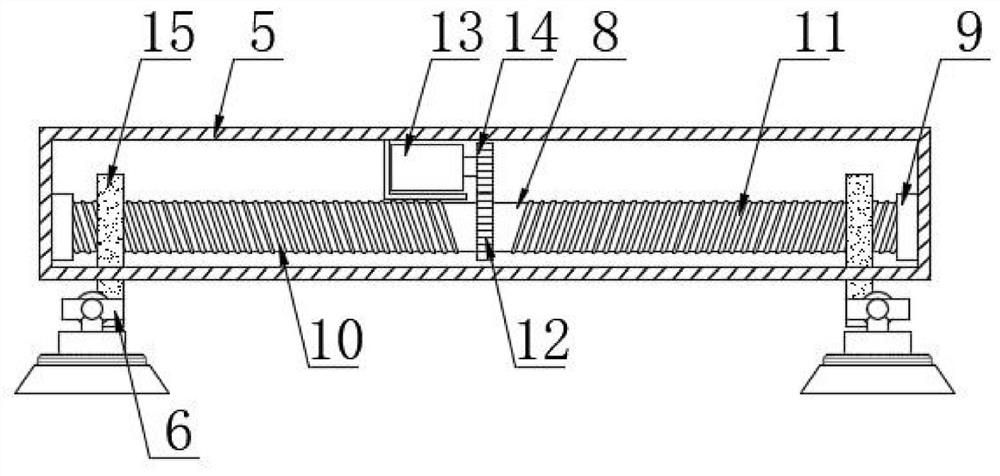
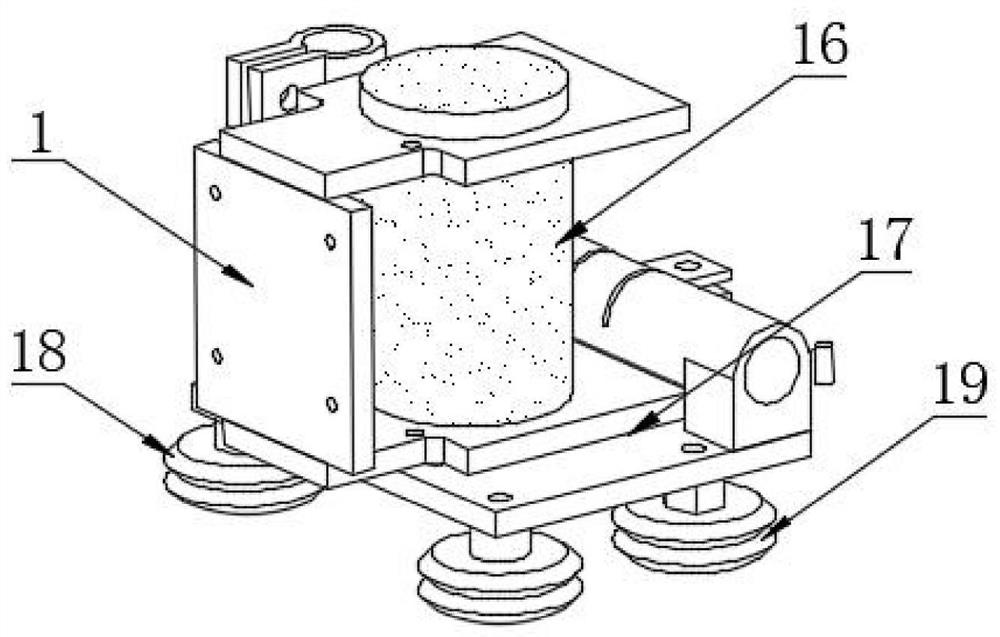
[0026] see Figures 1 to 5 , In this embodiment of the present invention, a position-adjustable manipulator suction cup device includes a first drive seat 1, a second drive seat 21, a first suction cup assembly, a second suction cup assembly and a guide assembly, wherein the first drive seat 1 and the second drive base 21 are fixedly installed on the frame in a straight line, characterized in that the first suction cup assembly is driven by the first drive base 1 to move along the direction of the straight line, and the second The suction cup assembly is driven by the second drive base 21 to move in the direction of the straight line, and the guide extending along the straight line direction is also provided between the first suction cup assembly and the second suction cup assembly assembly; the suction cup group of the first suction cup assembly can be inclined and rotated at a certain angle at the same time, and the suction cup group of the second suction cup assembly can al...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More