

Multi-agent auto-disturbance time-varying formation tracking and collision avoidance control method under obstruction of obstacle
A multi-agent, control method technology, applied in non-electric variable control, control/regulation systems, two-dimensional position/channel control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0071] The present invention will be further described below in conjunction with the accompanying drawings and simulation experiments.
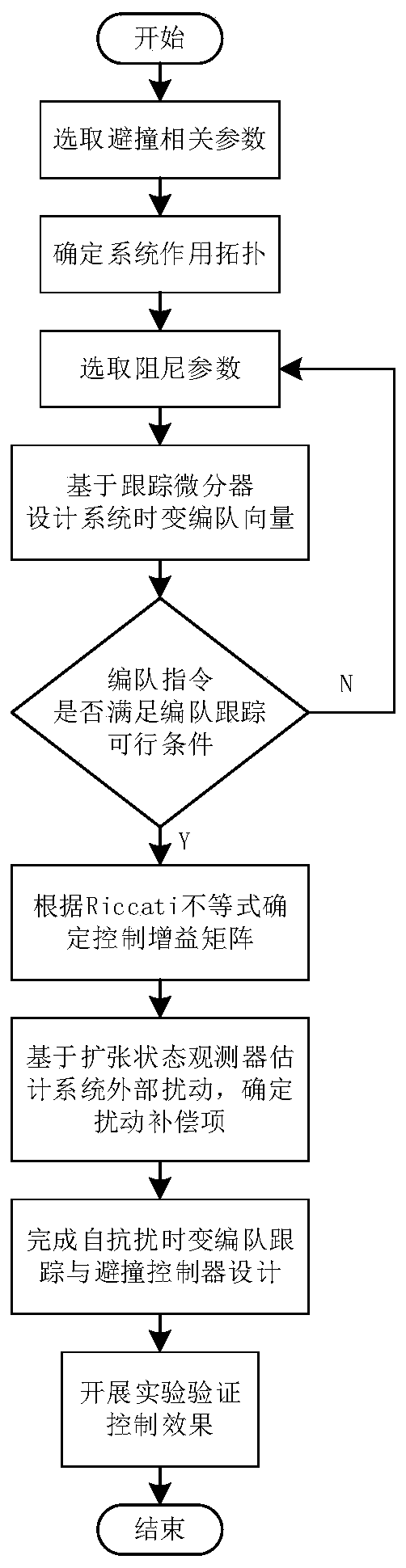
[0072] The present invention provides a multi-agent anti-disturbance time-varying formation tracking and collision avoidance control method under the occlusion of obstacles, including the following content:
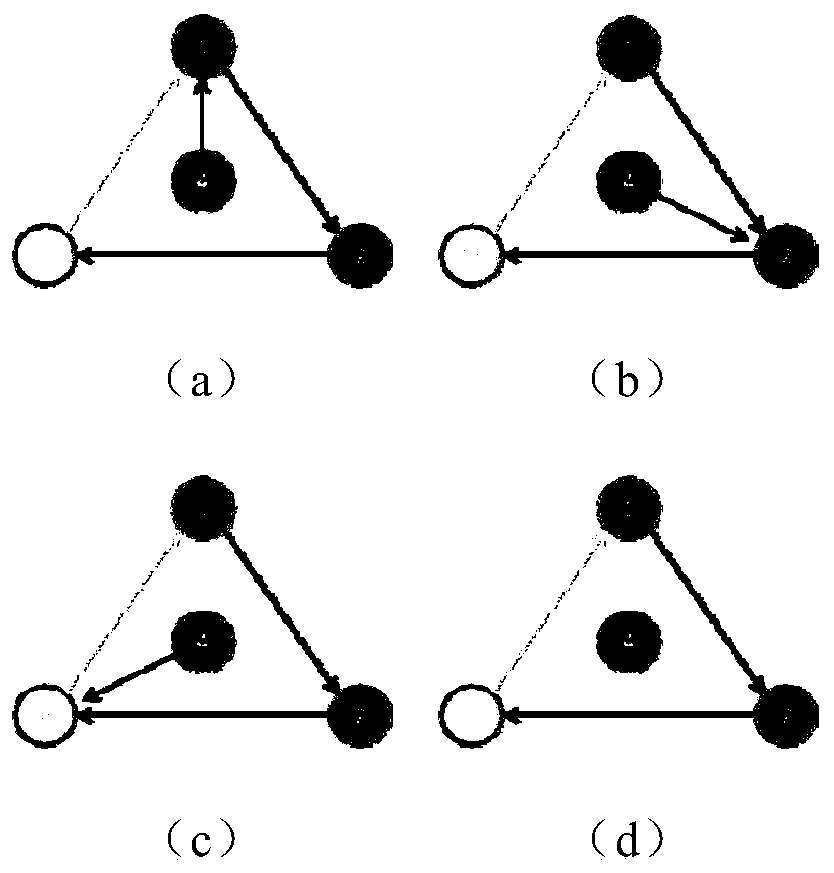
[0073] 1. System modeling and time-varying formation tracking and collision avoidance controller
[0074] For a multi-agent system composed of 1 moving target and N-1 agents, the agents in the system are numbered from 1 to N in sequence, and the dynamic model of the target is expressed as:
[0075]
[0076] In the formula, and Represent the position and velocity of the target, n represents the spatial dimension, α x and alpha v is the damping coefficient. The dynamic model of the i(i∈{2,3,…,N}) agent is described as follows:
[0077]
[0078] in and are n-dimensional vectors, representing the position, velocity, control...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More