Anti-collision device for robot collision detection
A technology of collision detection and anti-collision device, applied in the field of robots, can solve the problems of small contact force threshold, high rigidity of the device, and inability to realize buffering, etc., and achieve the effect of increasing the contact force threshold, high structural flexibility, and ensuring safety.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be described in further detail below.
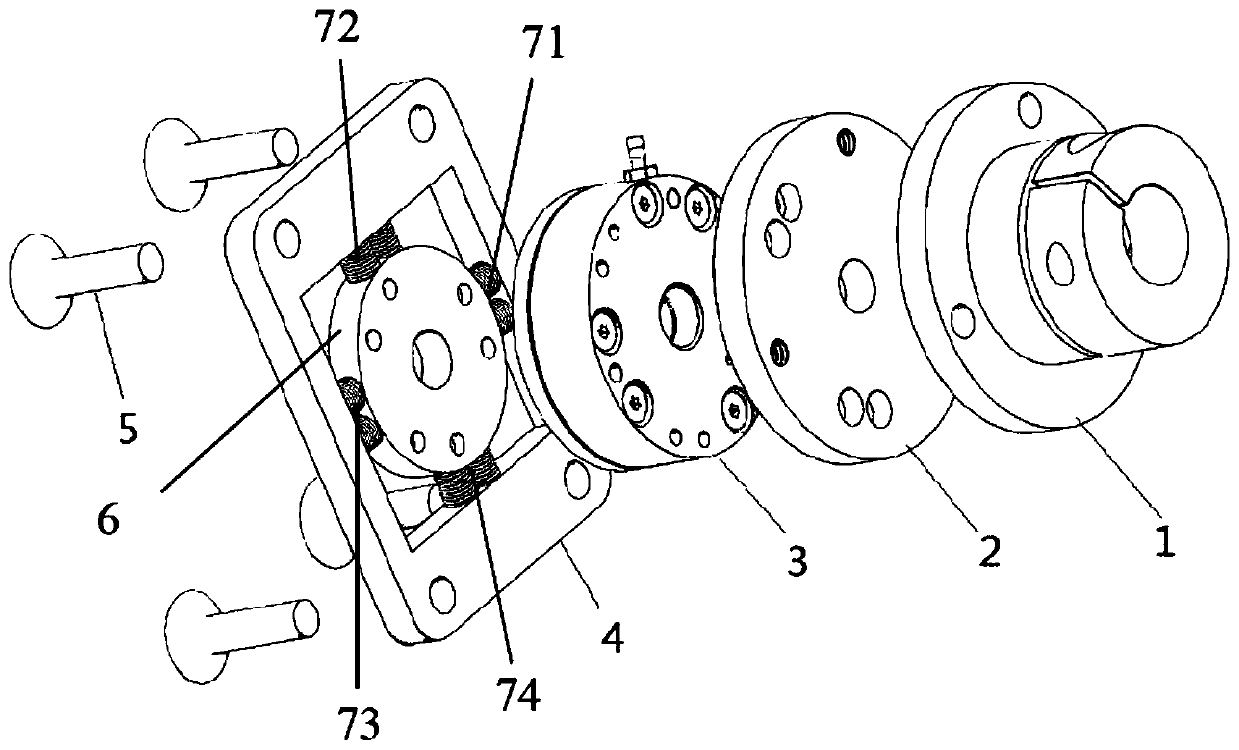
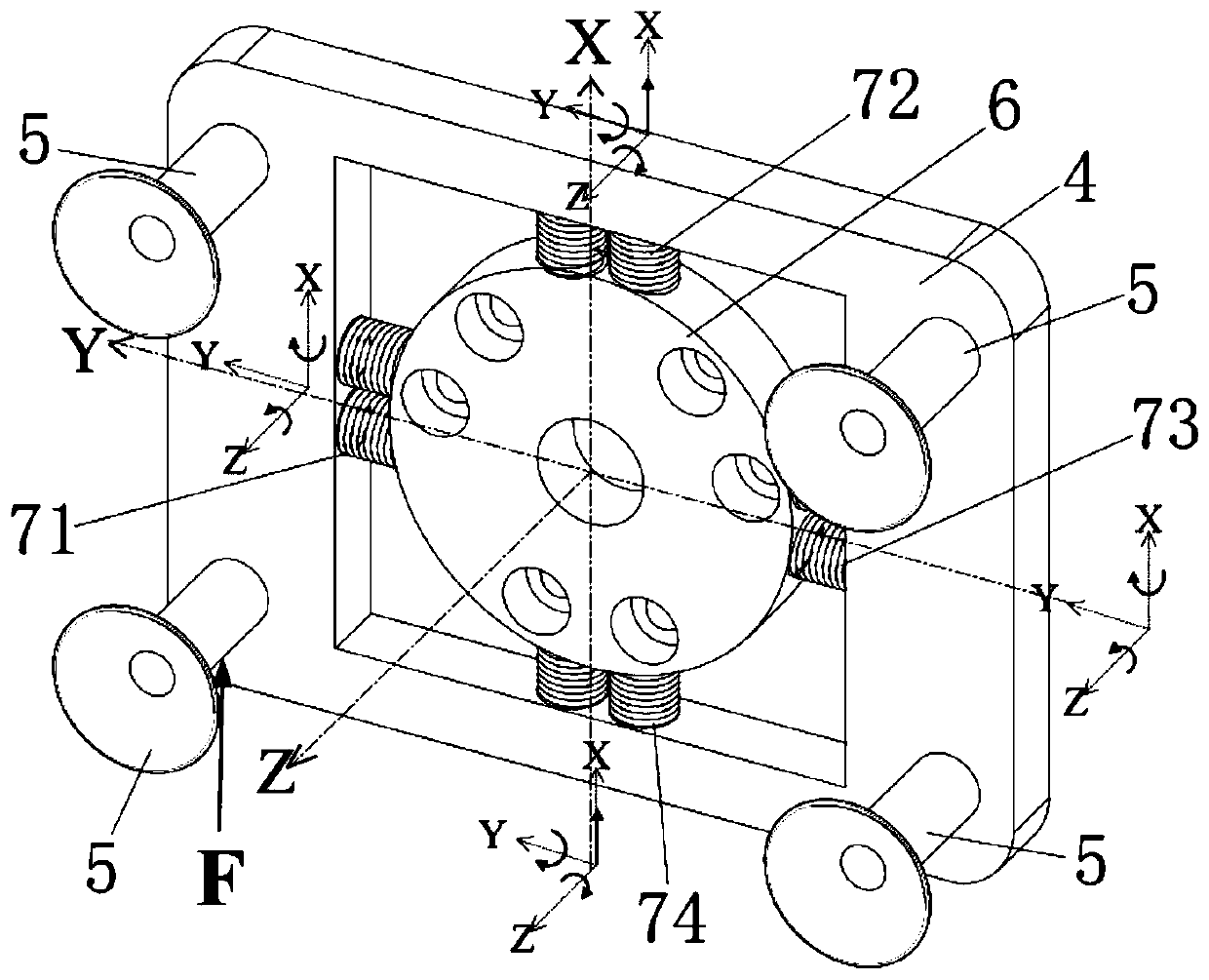
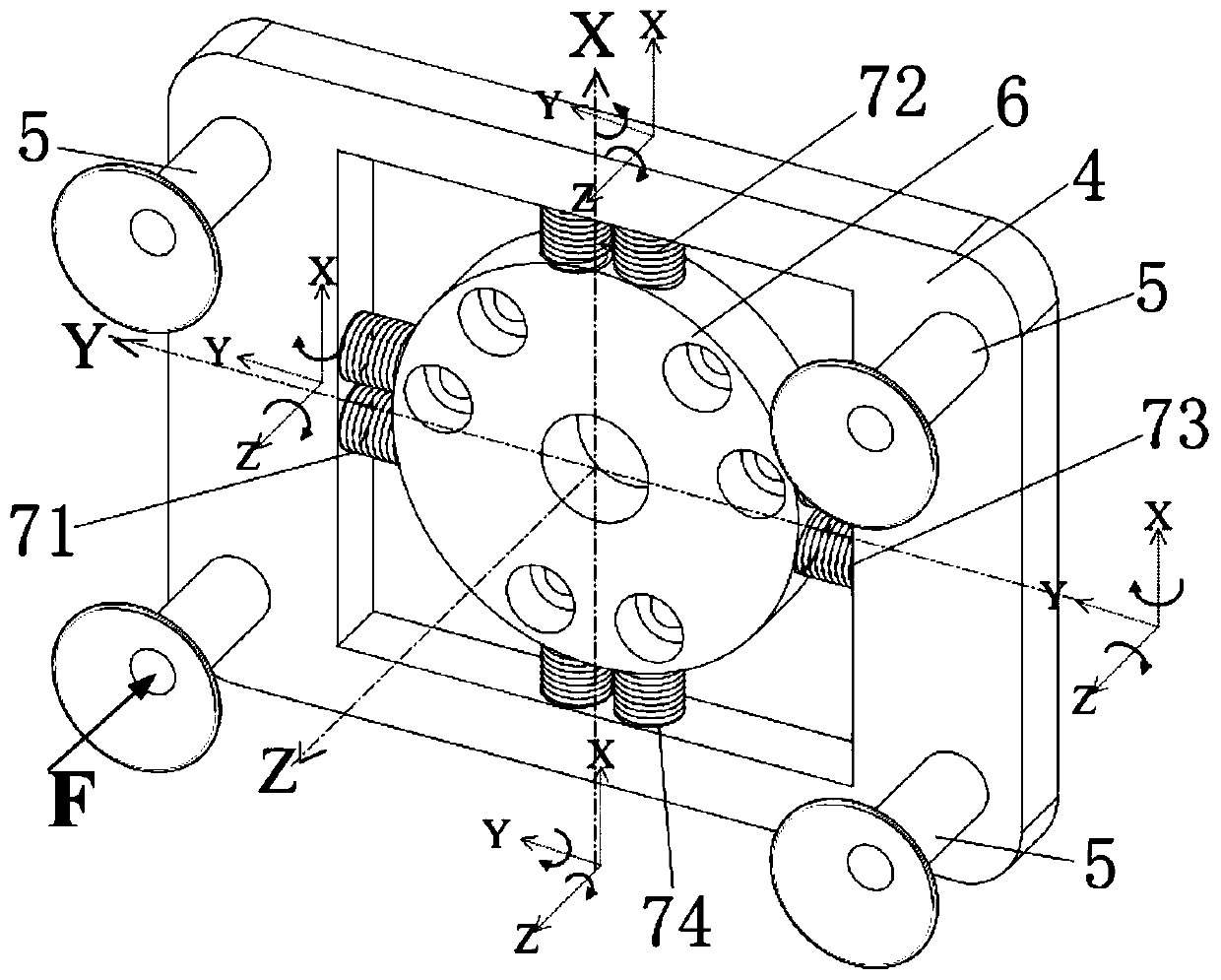
[0026] Such as figure 1 As shown, an anti-collision device for robot collision detection includes a guide shaft support 1, a force sensor 3 and an actuator fixture, the guide shaft support 1 and the force sensor 3 are affixed, and the actuator fixture includes a clamp body 4 and Pneumatic suction cup 5, a through hole is provided in the fixture body 4, the conduction direction of the through hole is parallel to the extension direction from the guide shaft support 1 to the force sensor 3, a plurality of springs are arranged in the through hole, and the two ends of each spring They are fixedly connected to the fixture body 4 respectively, and there are included angles between the plurality of springs, and the middle parts of the plurality of springs are respectively connected and the connection points are fixedly connected to the force sensor 3 .
[0027] Specifically, the guide shaft support 1 is fixed t...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Length | aaaaa | aaaaa |
| Pitch | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com