

Modularized robot based on tensioned integral structure
A tensegrity structure and modular technology, applied in the field of robotics, can solve the problems of reduced robot stability, low robot motion efficiency, and difficult motion prediction, etc., to achieve the effects of improving life, improving stability, and reducing impact
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
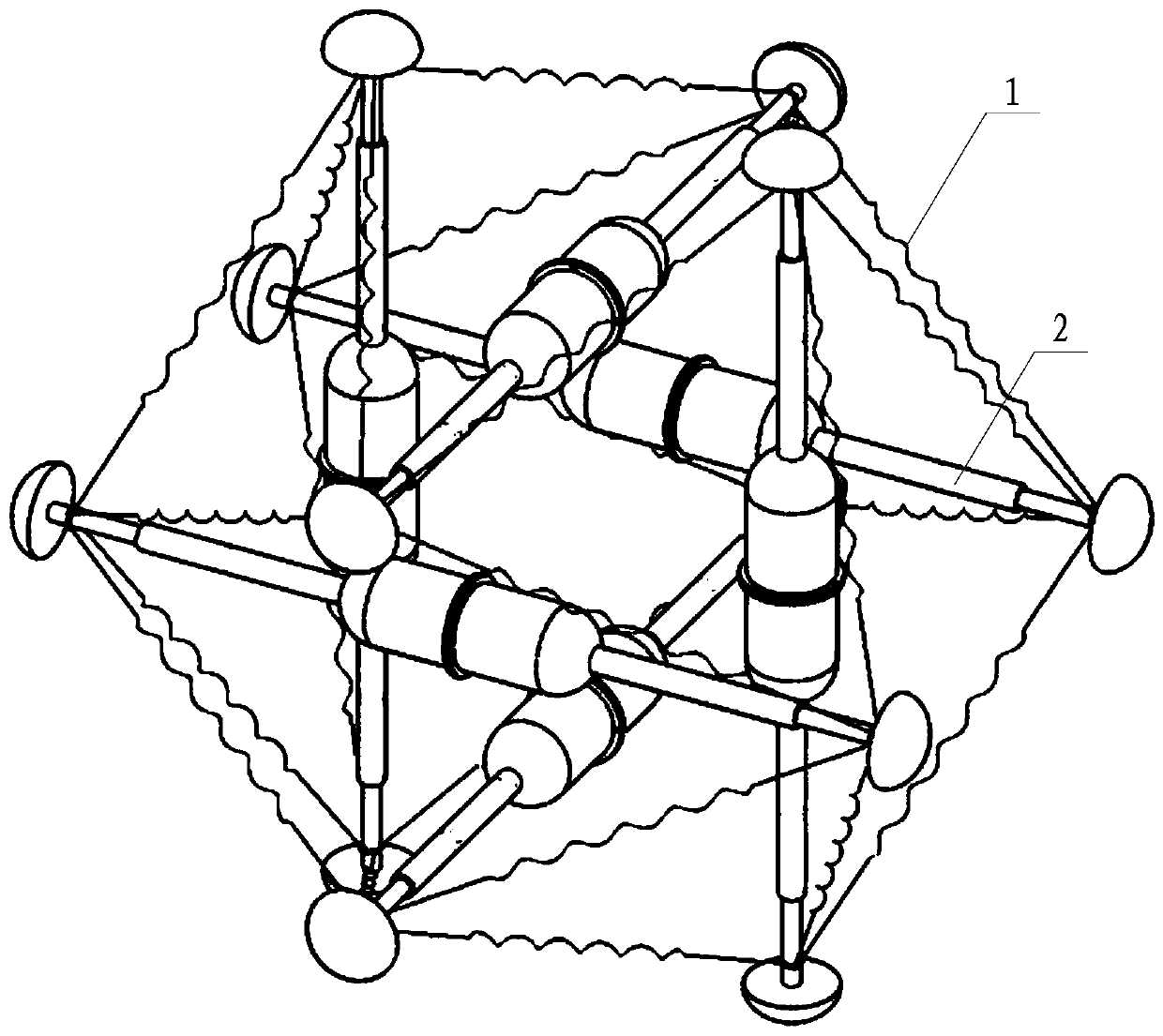
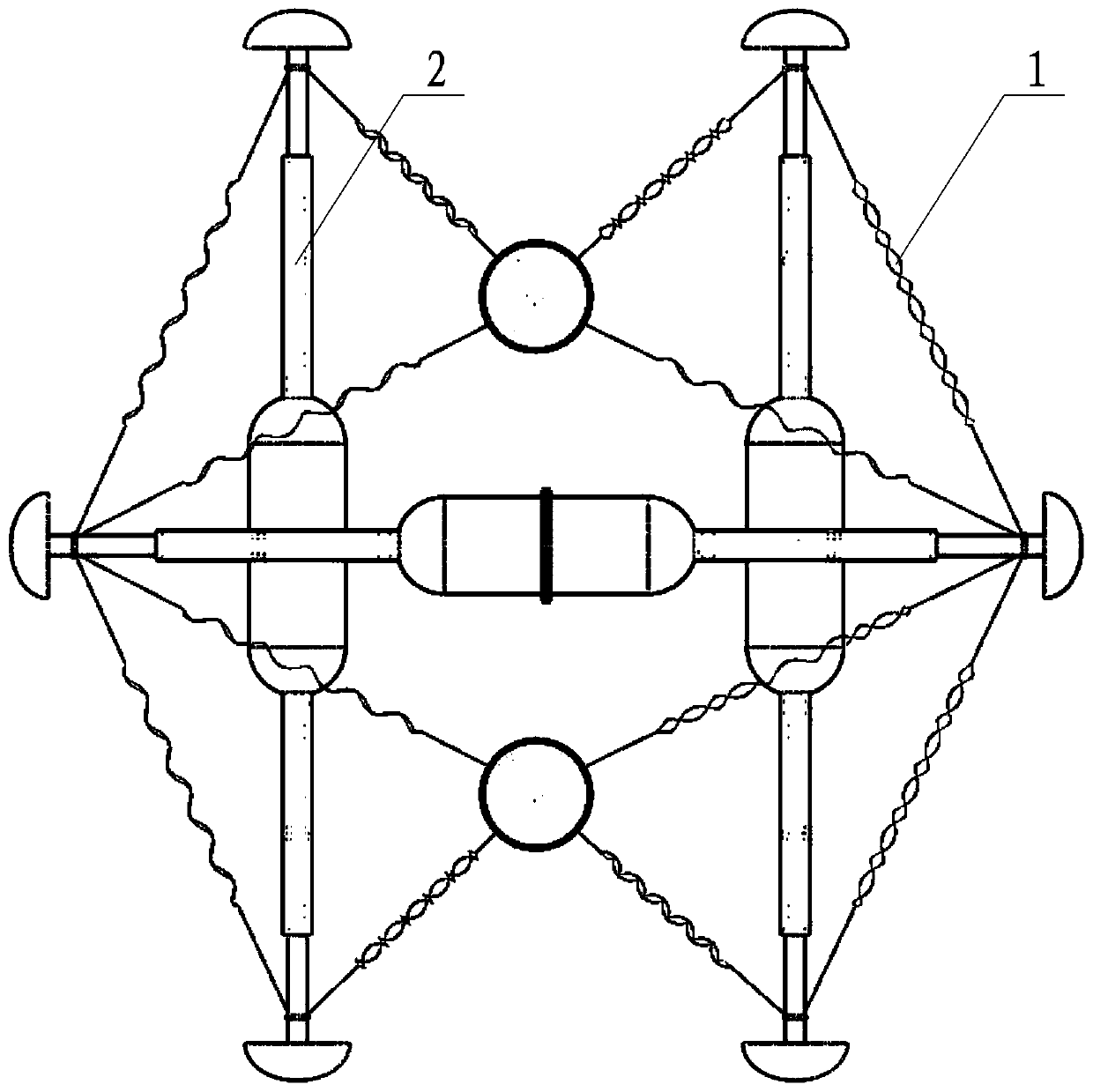
[0032] The present invention will be described in further detail below with reference to the drawings.
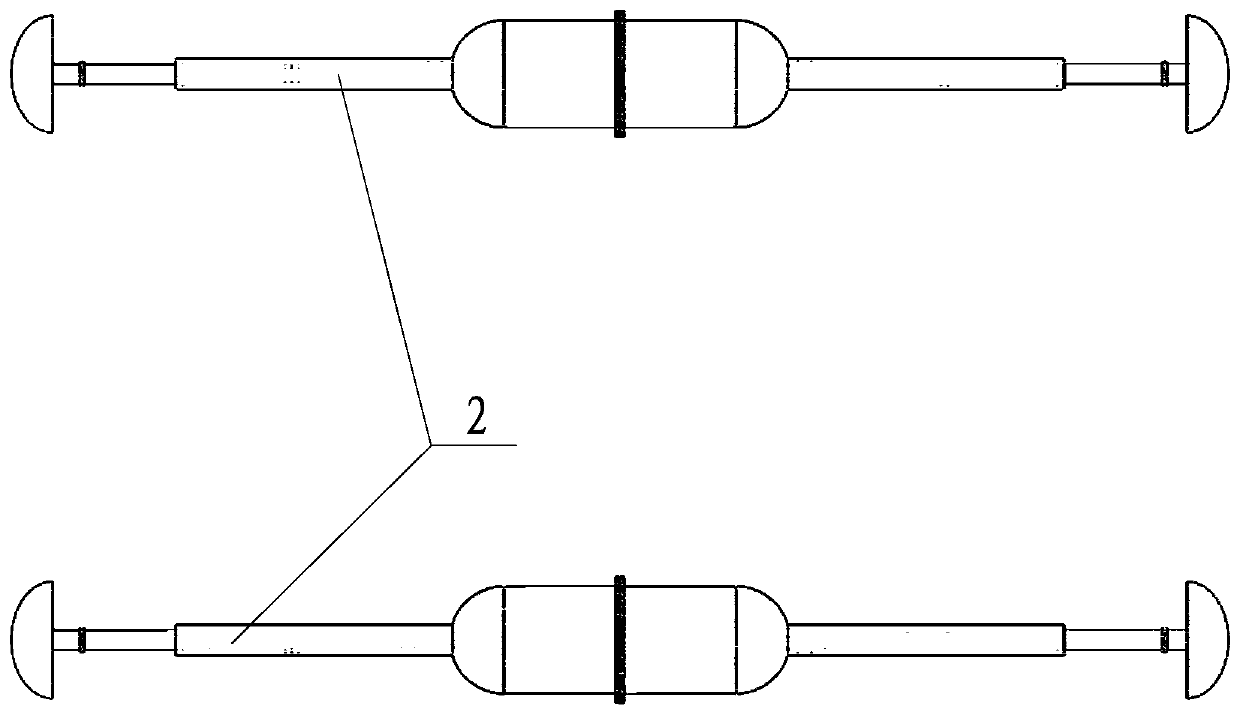
[0033] Such as figure 1 , figure 2 As shown, the present invention includes an elastic cable 1 and a retractable pressure rod 2, wherein there are six pressure rods 2 divided into three groups, two pressure rods 2 in each group are parallel to each other, and two pressure rods 2 in the three groups The planes where the axial centerlines of the two pressure rods 2 are located are perpendicular to each other; that is, the plane where the axial centerlines of the two pressure rods 2 of any one of the three groups are located is parallel to the axial center lines of the other two pressure rods 2, and the other group The two pressure rods 2 are located on both sides of the plane, and the third group of two pressure rods 2 intersect the plane perpendicularly; there are two pressure rods 2 of another group between any of the three groups. , And the two pressure rods 2 of any group a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More