

Crawling robot driven based on SMA
A technology of crawling robot and robot body, applied in motor vehicles, transportation and packaging, etc., can solve the problem that robots cannot enter, cannot assist human work, etc., and achieve the effect of improving stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The technical solution of the present invention will be further described in detail below in conjunction with the accompanying drawings, but the protection scope of the present invention is not limited to the following description.
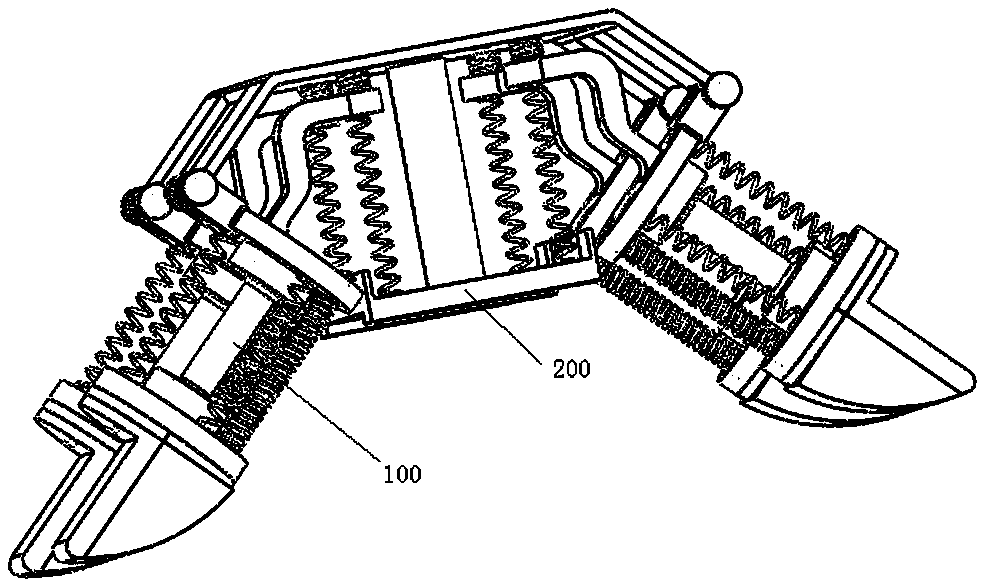
[0022] Such as figure 1 As shown, the crawling robot driven by SMA includes a robot body 200 and several leg structures 100 , and the several leg structures 100 are arranged symmetrically on both sides of the robot body 200 .
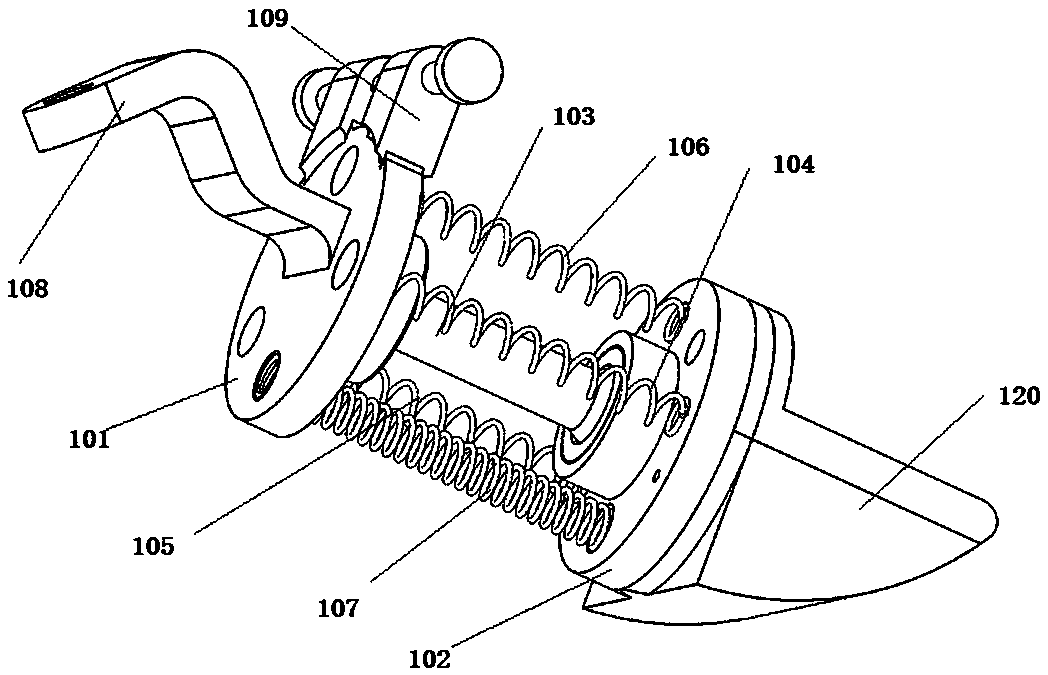
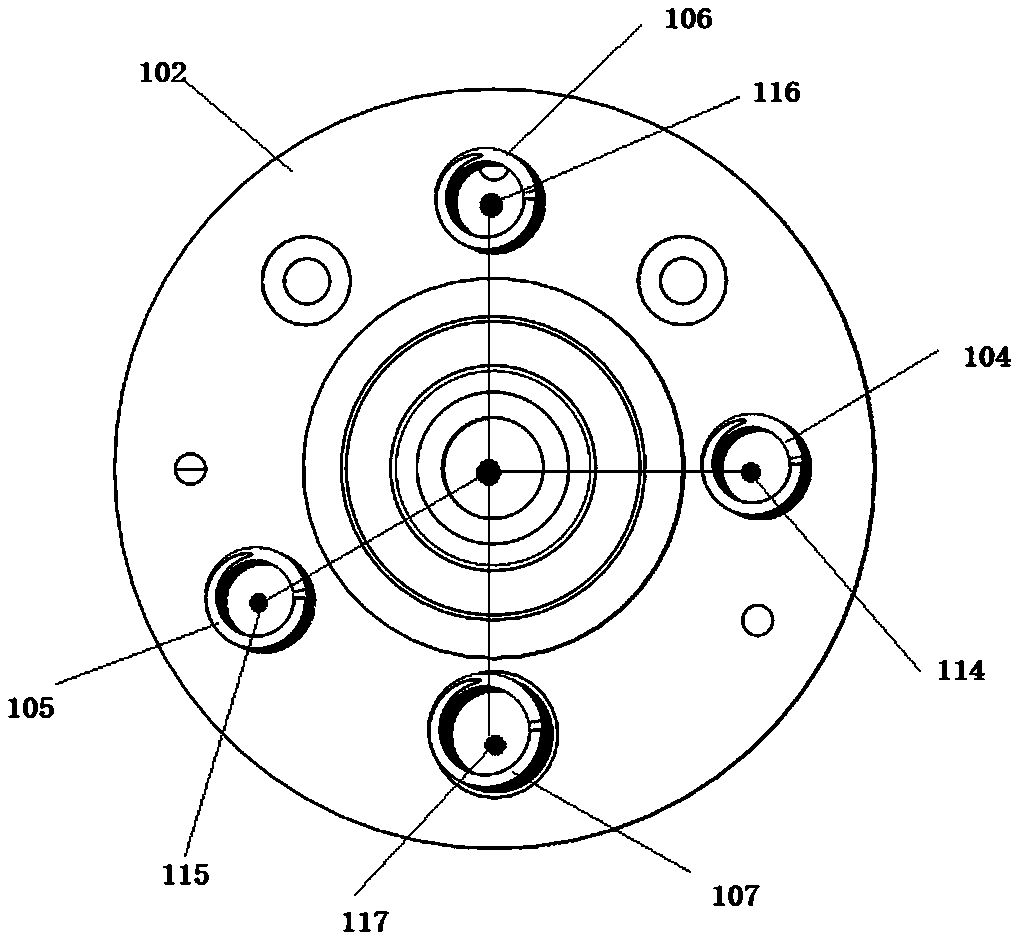
[0023] Such as figure 2 As shown, the leg structure 100 includes an upper end cover 101, a lower end cover 102, a connecting shaft 103, a front SMA spring 104, a rear SMA spring 105, an upper SMA spring 106 and a rigid spring 107, and the leg structure 100 passes through the upper end cover 101 Connect with the robot body 200.
[0024] The upper end cover 101 and the lower end cover 102 are arranged oppositely. One end of the connecting shaft 103 is connected with the center of the upper end cover 101 through a ba...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More