

Obstacle detection error correction and safety collision prevention method of unmanned surface vehicle
A technology for error correction and obstacles, which is applied in the field of obstacle detection error correction and safety collision avoidance of unmanned surface vehicles. safety effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] Specific embodiments of the present invention will be described below.
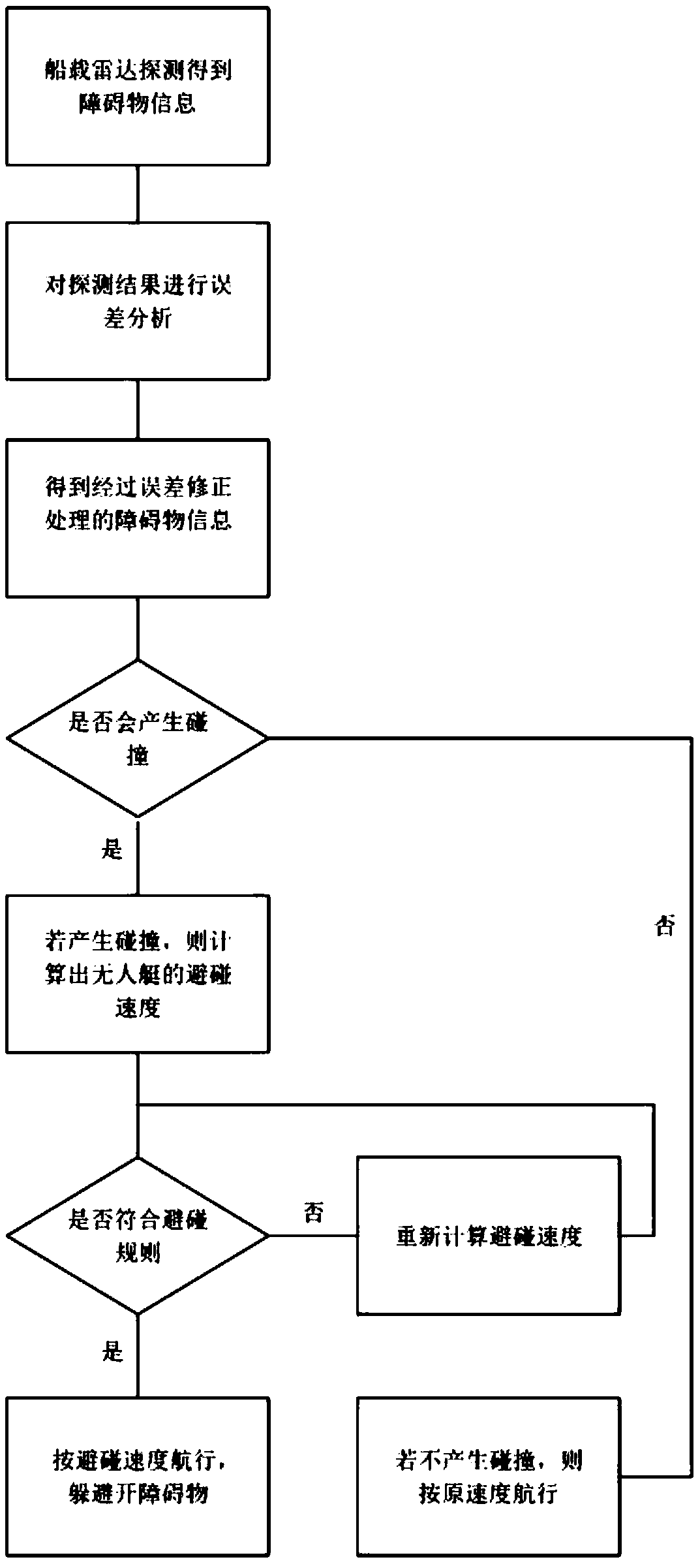
[0040] An unmanned surface vehicle obstacle detection error correction and safe collision avoidance method comprises the following steps:
[0041] The first step: the shipborne radar detects and obtains the obstacle information; the obstacle information includes the horizontal coordinate y, the longitudinal coordinate x, the length L and the width W of the obstacle in the coordinate system of the unmanned ship, the length L and the width W of the obstacle, and the Lateral movement velocity V in the human-boat coordinate system y with longitudinal motion speed V x .
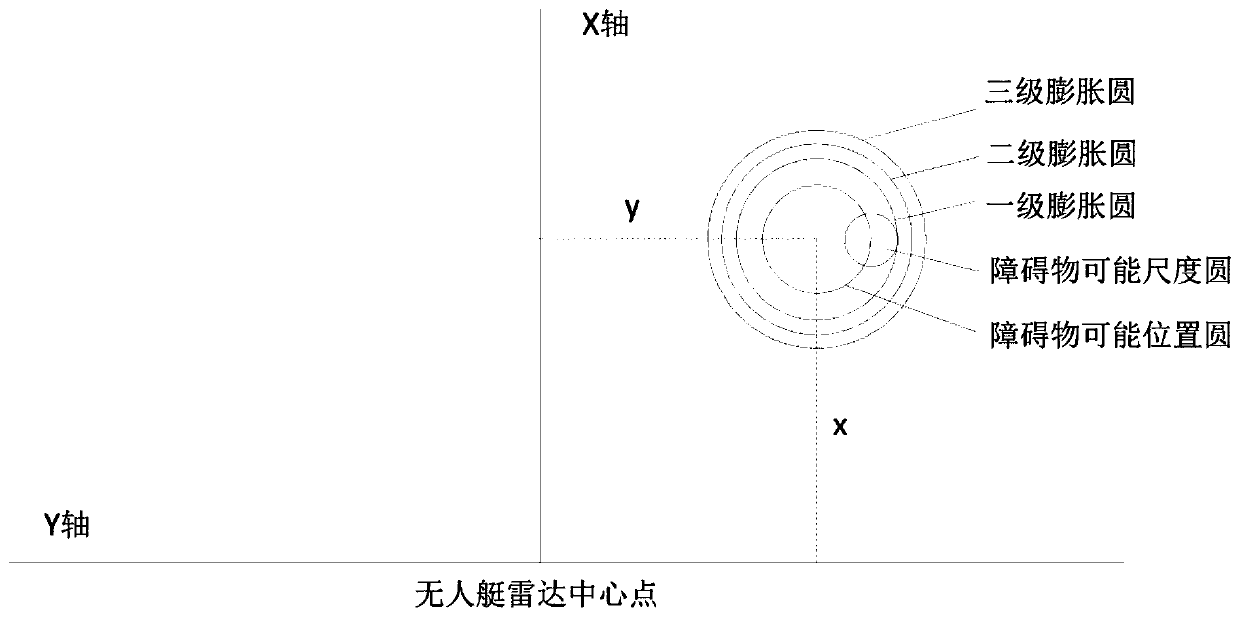
[0042] The second step: carry out error analysis on the information obtained in the first step detection, the specific steps of this error analysis are as follows (such as figure 2 shown):
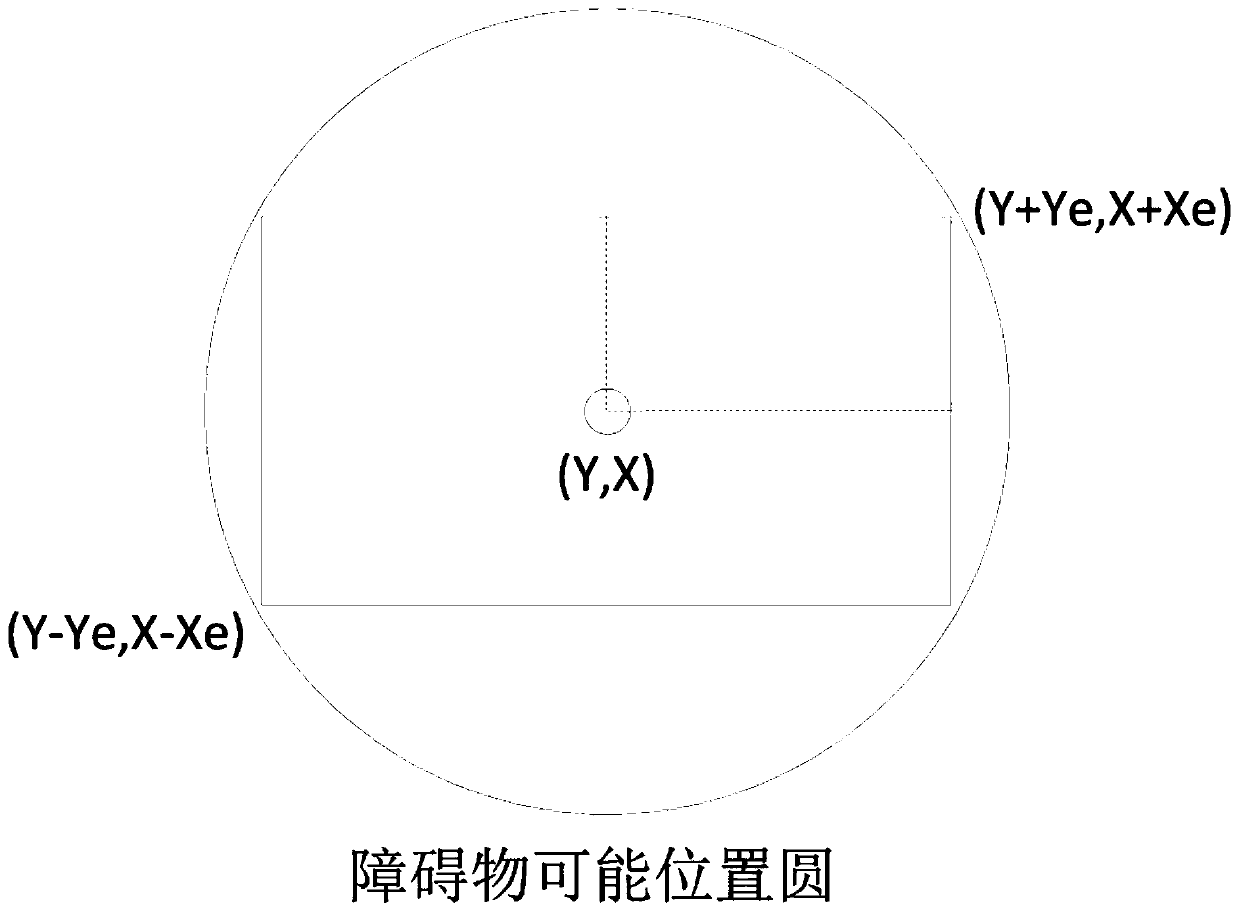
[0043] A: According to the horizontal coordinate y of the obstacle in the coordinate system of the unmanned ship, the longitudinal coordinate...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More