

Inland river unmanned ship collision avoidance method based on model predictive control
A model predictive control and unmanned ship technology, applied in two-dimensional position/channel control and other directions, to achieve simple principles and calculations, improve navigation safety, and facilitate implementation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
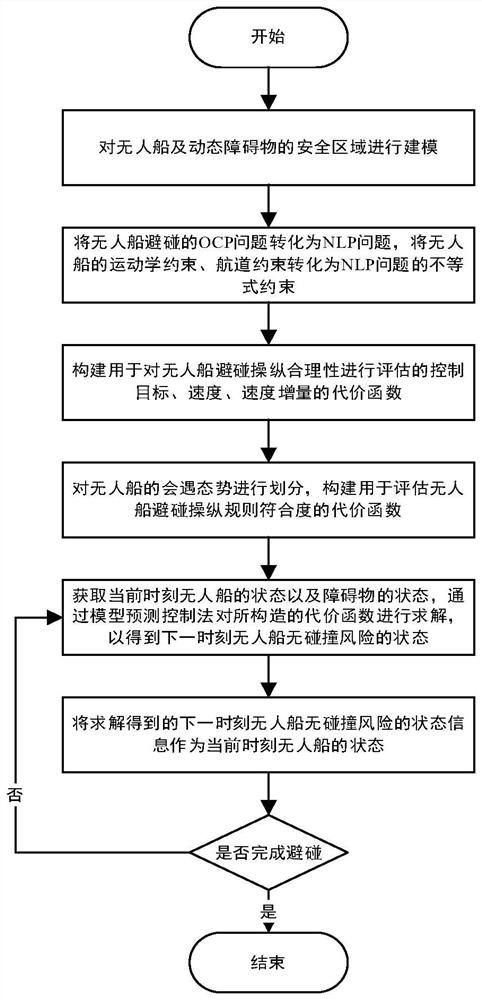
[0042] A kind of inland river unmanned vessel collision avoidance method based on model predictive control described in the present invention is used to solve the autonomous collision avoidance problem of unmanned vessel when navigating in inland river complex waterway environment, the flow chart of algorithm is as follows figure 1 As shown, the specific implementation process is:
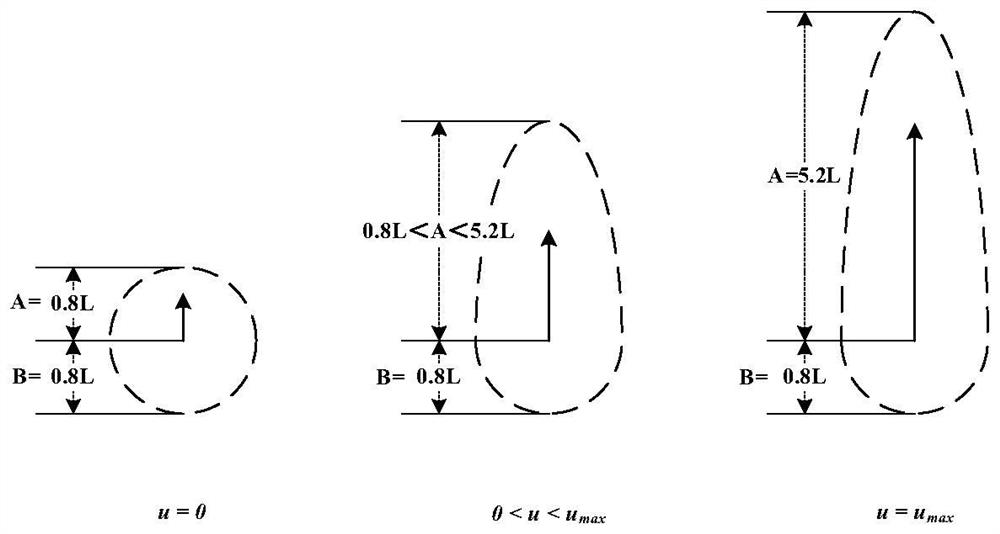
[0043] S1, using the improved Bumper model whose size changes with the speed of unmanned ships or obstacles to model the safe area of unmanned ships and dynamic obstacles, the specific method is:
[0044] When the speed of the USV or the obstacle ship is 0, the size of the safe area is selected as a circular area with a radius of B=0.8L in this example, where L is the length of the ship, and the value is 5m;
[0045] When the speed of the USV or obstacle ship reach...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More