

Method for path planning of equipped vehicle based on transfer learning
A technology of vehicle routing and transfer learning, applied in the field of vehicle routing, can solve the problems of large impact, time-consuming, and re-routing of equipped vehicles, and achieve the effect of improving the planning speed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
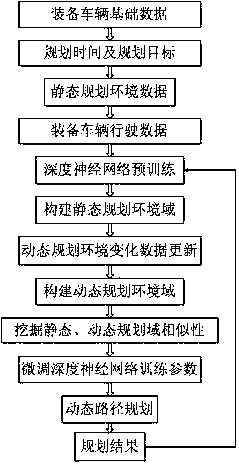
[0063] A method for path planning of equipment vehicles based on migration learning, comprising the following steps,
[0064] S1 ~ Obtain the basic data of the equipped vehicle, including the length, width, height and load-bearing basic parameters of the equipped vehicle.
[0065] S2~Get the planning time and planning goal; the marching in the war is set with the latest arrival time, through different planning goals, including the shortest surface distance, the shortest time, the least risk and the least fuel consumption, reversely pass the time points and possible points of each key point Rest time, and then calculate the latest departure time of equipped vehicles.
[0066] S3 ~ Obtain static planning environment data, including surface data, terrain data and meteorological data that affect the driving of the equipped vehicle.
[0067] S4~Get the driving data of the equipped vehicle, based on the acquired surface terrain data and specific meteorological data, obtain the driv...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More