

Bend passing control method and device for automatic driving vehicle, equipment and medium
An automatic driving and vehicle technology, which is applied to control devices, vehicle components, input parameters of vehicle conditions, etc., can solve problems such as unreasonable speed adjustment, low success rate of vehicle passing, and inability to adapt to the changing curve environment, etc. The effect of passing success rate, improving road safety, and ensuring safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] Exemplary embodiments of the present application are described below in conjunction with the accompanying drawings, which include various details of the embodiments of the present application to facilitate understanding, and they should be regarded as exemplary only. Accordingly, those of ordinary skill in the art will recognize that various changes and modifications of the embodiments described herein can be made without departing from the scope and spirit of the application. Also, descriptions of well-known functions and constructions are omitted in the following description for clarity and conciseness.
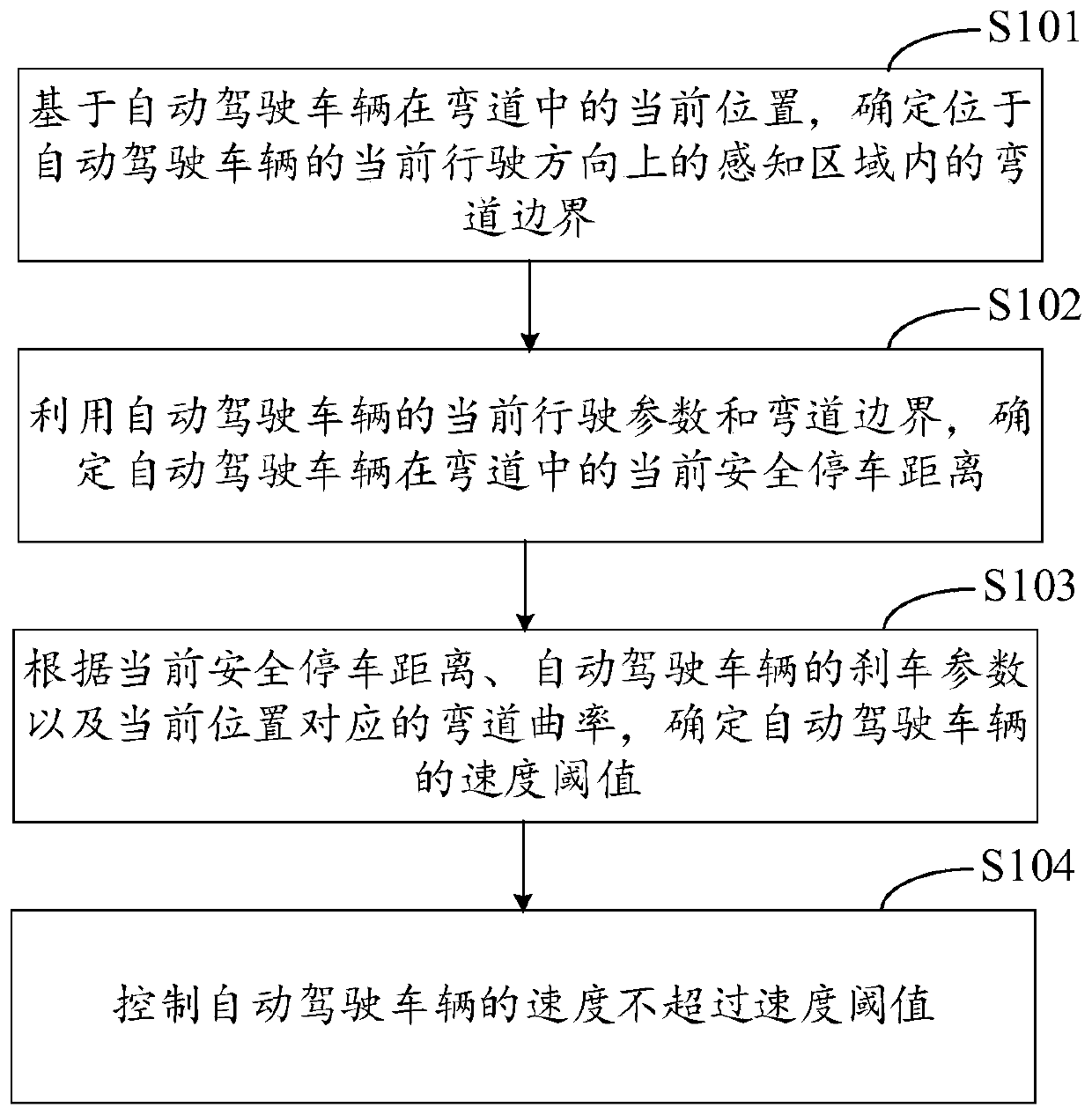
[0062] figure 1 It is a flow chart of a curve passage control method for an automatic driving vehicle disclosed according to the embodiment of the application. This embodiment is applicable to the turning passage of the automatic driving vehicle or the unmanned vehicle during the curve driving process. In the case of reasonable control, the curved road section inclu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More