

Finite time planning method for cooperated repeated motion of double arm manipulator
A repetitive movement, limited time technology, applied in the direction of manipulators, program control manipulators, manufacturing tools, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0039] The present invention will be further described below in conjunction with the accompanying drawings.
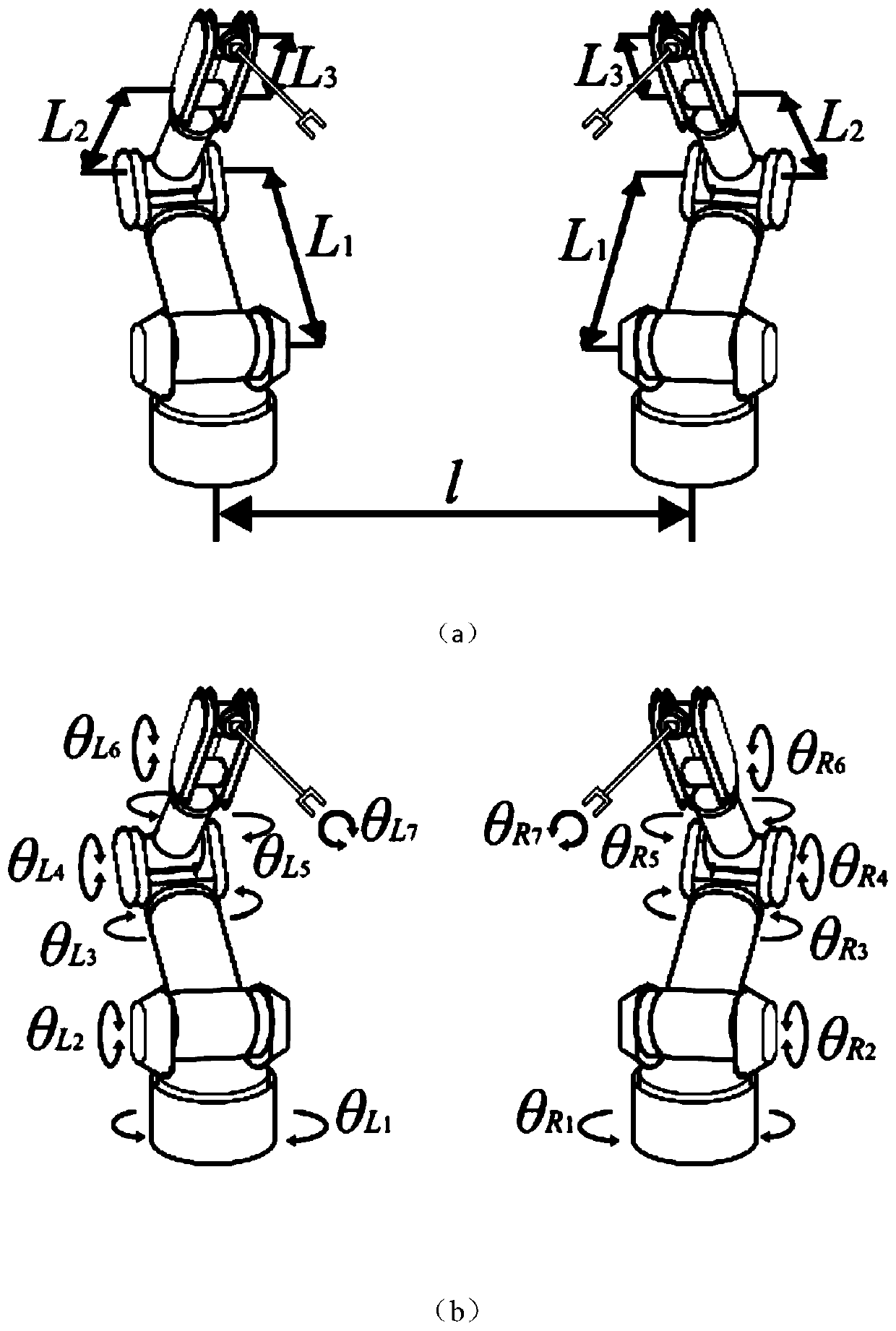
[0040] refer to Figure 1 to Figure 6 , a finite-time planning method for dual-arm manipulator cooperative repetitive motion based on quadratic programming, comprising the following steps: 1). Determine the expected target trajectory of the left and right end effectors of the dual-arm manipulator and the expected angles of each joint; 2). Establish Redundant dual-arm manipulator repetitive motion quadratic programming scheme; 3). Construct a final state network with finite time convergence characteristics, solve the quadratic programming problem, and obtain the angular trajectory of the left and right kinematic joints; 4). Send the calculated results to Drive the movement of the manipulator to the lower computer controller.
[0041] In the step 1), first set the angles of each joint that the dual-arm manipulator expects to close together,
[0042]
[0043]
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More