Human intention understanding method based on deep stacking Bi-LSTM for man-machine cooperation
A deep and intentional technology, applied in the field of human intention understanding of two-way long-term short-term memory network, can solve the problem of unsatisfactory understanding of behavioral intention, and achieve the effect of easy operation, good effect and accurate accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] In order to facilitate those of ordinary skill in the art to understand and implement the present invention, the present invention will be further described in detail and in-depth below in conjunction with the accompanying drawings.
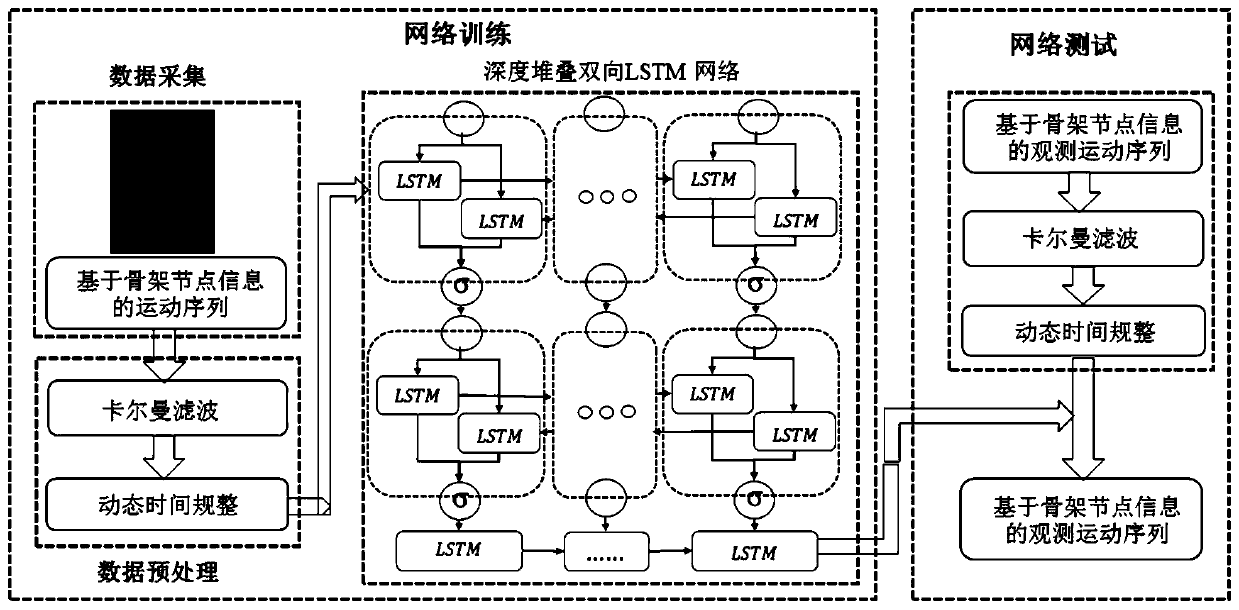
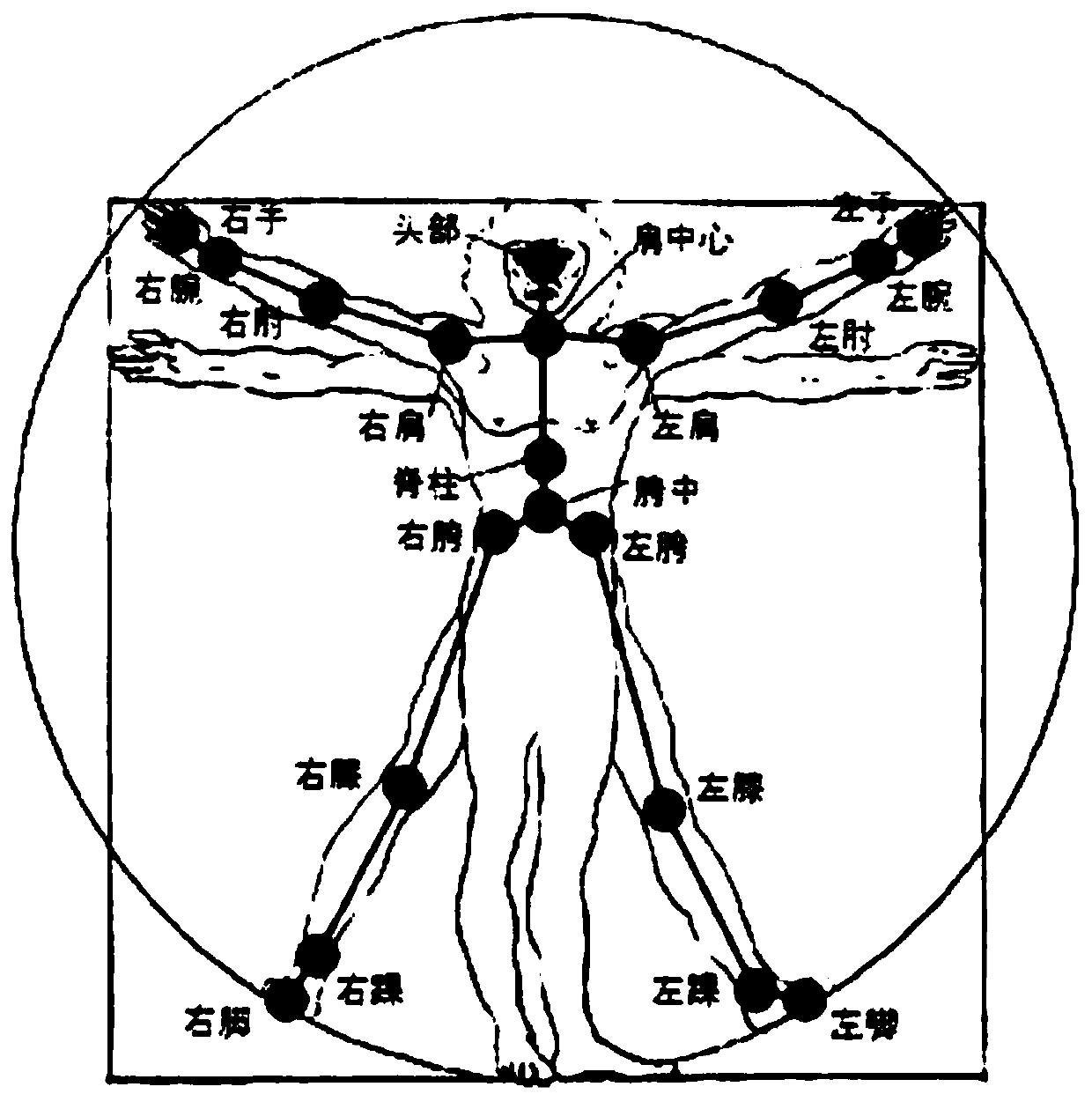
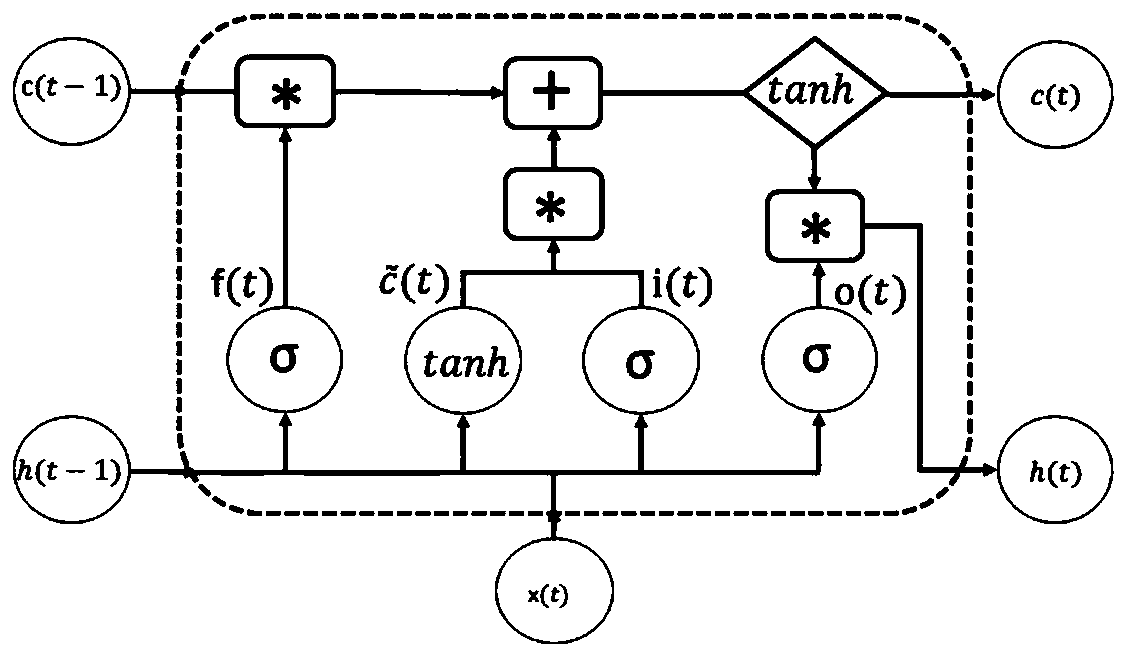
[0019] In order to realize safe and efficient human-machine collaboration, the robot is required to actively and intelligently recognize the intention of the operator. This invention uses a recurrent neural network based on deep stacked bidirectional long-term short-term memory to study the understanding of human behavioral intentions. First, the motion capture system (Kinect) based on the visual system is used to collect the motion sequence of the human body during human-machine collaboration, and the skeleton node information of the human body is obtained by using the human skeleton tracking technology; secondly, the skeleton node information of the human body is input into the deep stacked Bi-LSTM The model consists of multiple hidden la...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com