Self-adjusting anti-collision bearing parallel actuator of compact structure
A technology with compact structure and actuators, which is applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of locality, mechanical collision, and destruction of traditional sensor detection space, etc., and achieve the effect of compact structure and increased safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
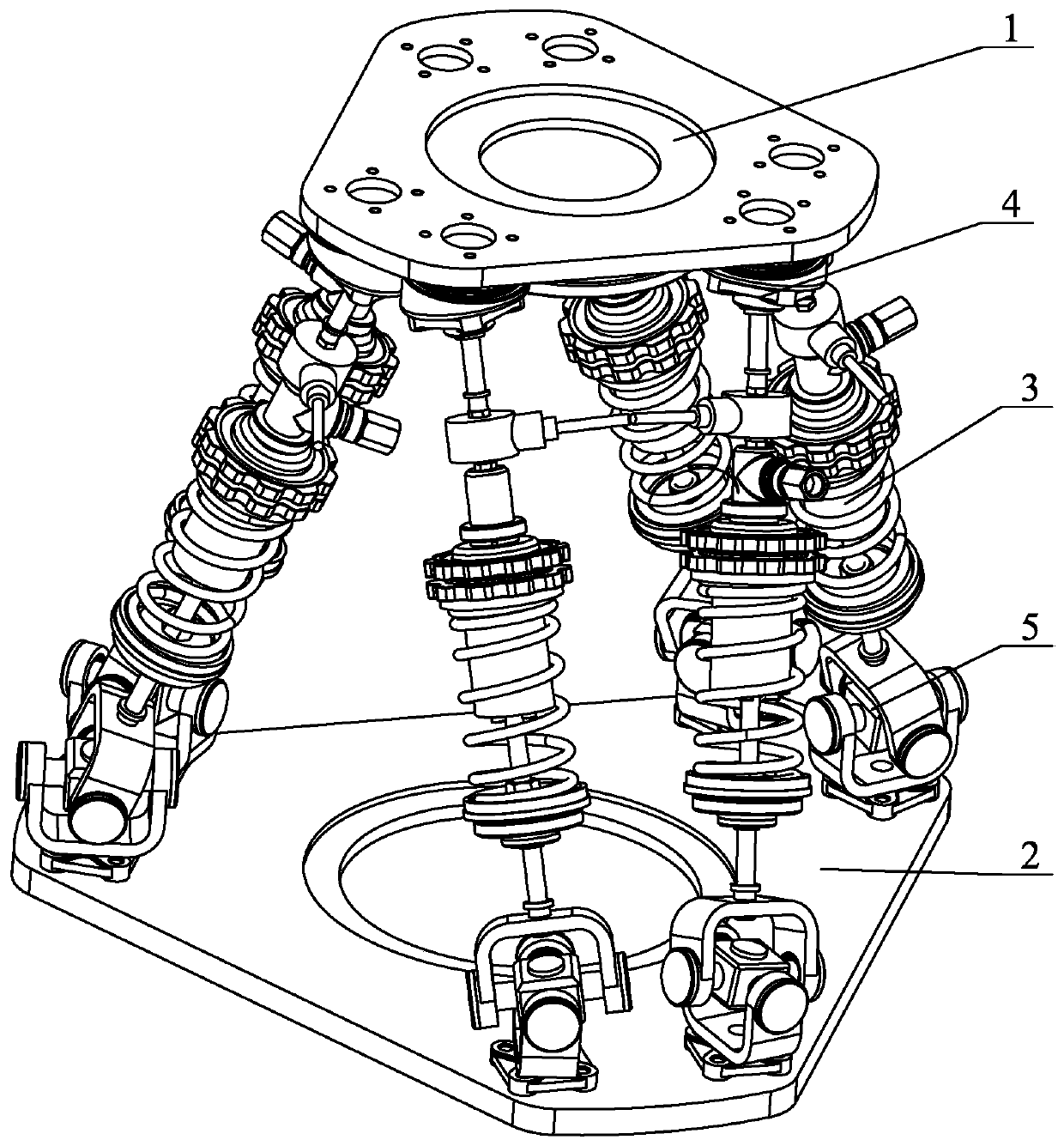
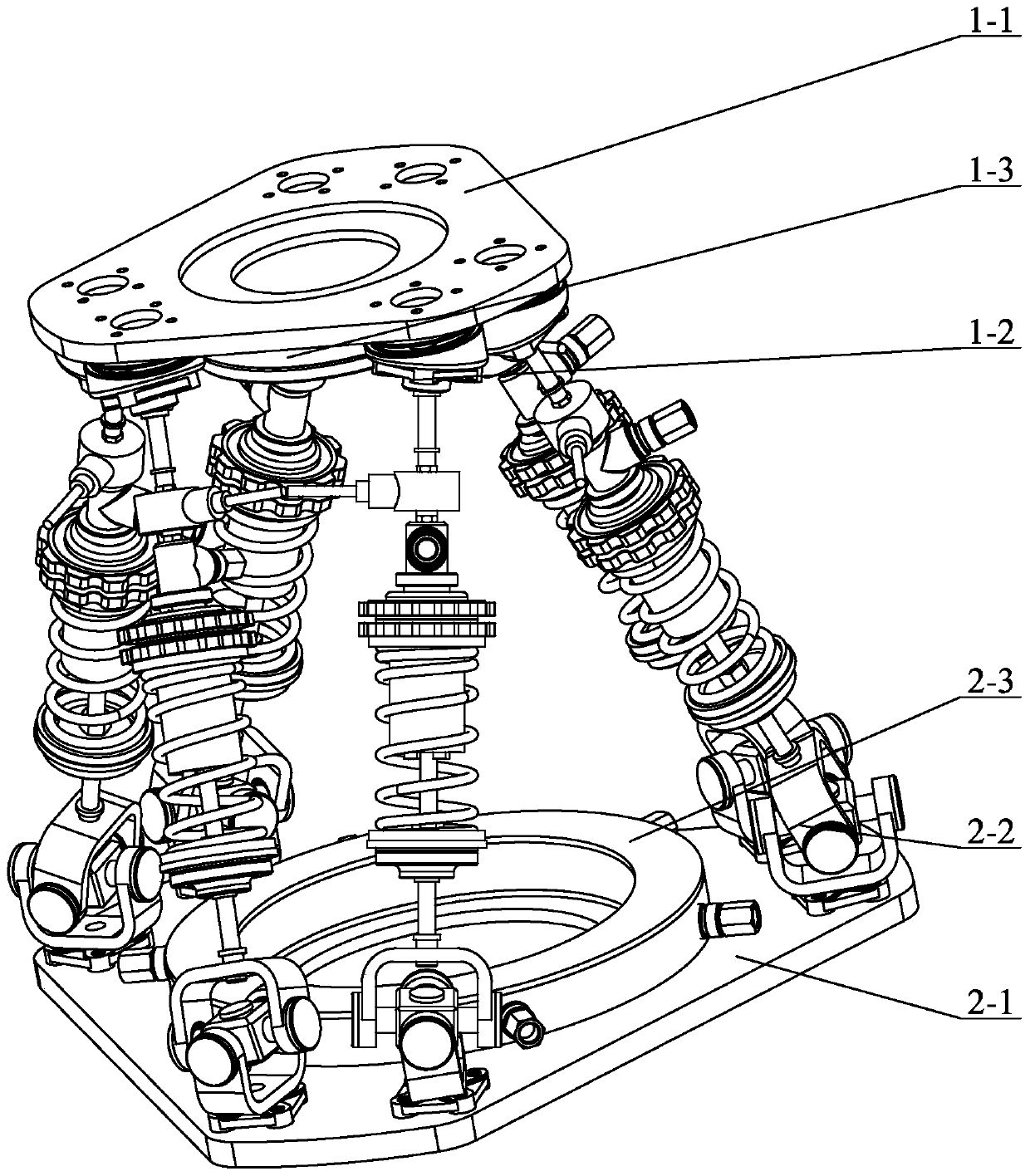
[0013] Specific implementation mode one: combine Figure 1 to Figure 4 This embodiment is described. A compact self-adjusting anti-collision load-carrying parallel actuator in this embodiment includes an actuator dynamic platform 1, an actuator static platform 2 and multiple actuator mechanisms. The actuator dynamic platform 1 and the actuator The static platform 2 of the actuator is arranged oppositely, and a plurality of actuator mechanisms are uniformly arranged between the dynamic actuator platform 1 and the static actuator platform 2. The actuator mechanism includes an actuator bearing rod 3, a ball hinge 4 and a Hookee One end of the actuator bearing rod 3 is connected to the inner end surface of the actuator moving platform 1 through a ball hinge 4, and the other end of the actuator bearing rod 3 is connected to the inner end surface of the actuator static platform 2 through a Hooke hinge 5,
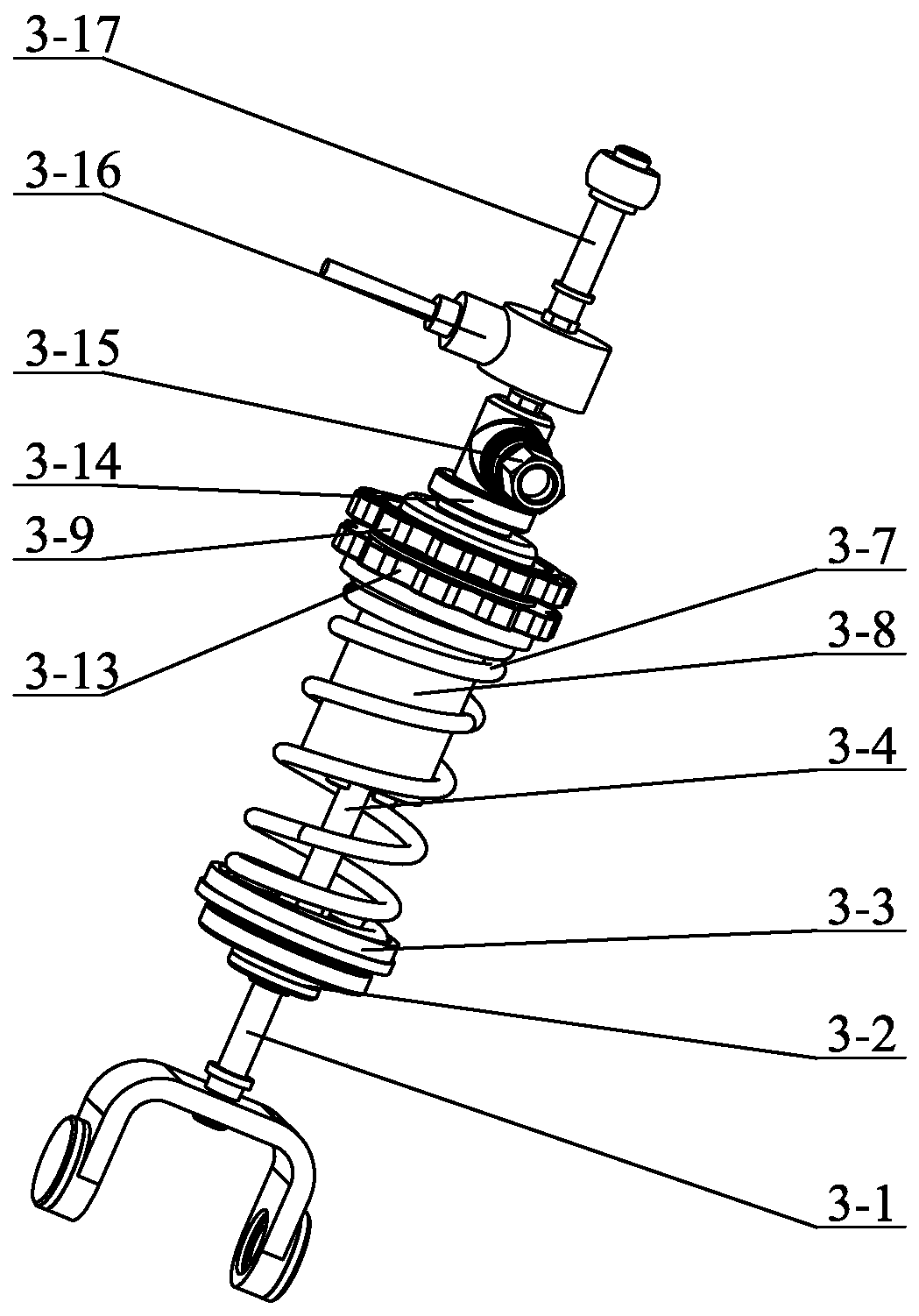
[0014] The actuator bearing rod 3 includes a Hooke hinge connecting rod 3-1, ...
specific Embodiment approach 2
[0016] Specific implementation mode two: combination Figure 1 to Figure 4 To illustrate this embodiment, the actuator carrying rod 3 in this embodiment also includes a hollow cock 3-14 and an air quick change joint 3-15. One end of the hollow cock 3-14 communicates with the bottom of the piston cylinder 3-8 and is hollow. The other end of the cock 3-14 is connected with the quick-change joint 3-15 of the air circuit. Other compositions and connection methods are the same as those in Embodiment 1.
[0017] In this embodiment, the upper end of the piston cylinder 3-8 is connected with a 90° hollow cock 3-14 and an air circuit quick change joint 3-15. 8 inflation, to realize the extension and retraction of piston telescopic rod 3-4.
specific Embodiment approach 3
[0018] Specific implementation mode three: combination Figure 4 Illustrate this embodiment, the cylinder mouth of piston barrel 3-8 described in this embodiment is provided with hollow ring type electromagnet 3-11, and piston telescoping rod 3-4 is inserted in the middle part of ring type electromagnet 3-11, ring type The outside of the electromagnet 3-11 is provided with a piston barrel screw cap 3-12, and the piston barrel screw cap 3-12 is arranged at the mouth of the piston barrel 3-8. Other compositions and connection methods are the same as those in the second embodiment.
[0019] In this embodiment, a hollow ring-type electromagnet 3-11 is installed at the bottom of the piston barrel 3-8, and is pre-tightened and attached to the mouth of the piston barrel 3-8 through the piston barrel screw cap 3-12, so as to limit the expansion and contraction of the piston. The role of rods 3-4. The piston telescopic rod 3-4 can be sucked during work, and the piston telescopic rod ...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap