Global Stiffness and Contact Force Calculation Method of Soft Fingertip Structure of Hemispherical Robot
A robot and hemispherical technology, applied in the field of mechanical models, can solve the problems of difficult to achieve precise manipulation of soft fingers, lack of soft finger models and force control methods, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] The principles and features of the present invention are described below in conjunction with the accompanying drawings, and the examples given are only used to explain the present invention, and are not intended to limit the scope of the present invention.
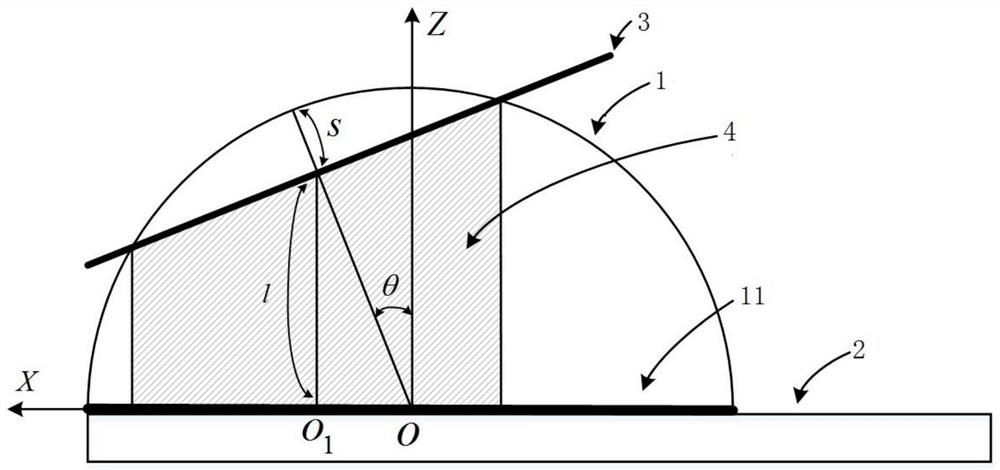
[0060] Such as figure 1 As shown, the robot soft fingertip structure refers to the addition of soft materials to the high-hardness end knuckles of conventional robot fingers, so that the knuckle structure has soft properties similar to the fingertips and pulps of human fingers. The hemispherical robot soft fingertip structure is composed of an elastic hemisphere 1 and a hard bottom plate 2 . The elastic hemisphere 1 is a whole piece of soft material in the shape of a regular hemisphere. The general preparation method of this material is to mix the raw materials evenly according to the specified ratio, send them to a vacuum device to remove air bubbles, and then pour them into a mold. Curing and molding at an approp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com