

Test method of L3-level autopilot system of vehicle-in-loop based on virtual driving scene
A technology of automatic driving and virtual driving, applied in vehicle testing, machine/structural component testing, general control system, etc., can solve problems such as long time period, complex application scenarios, high construction cost, etc., and reduce testing and evaluation errors Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
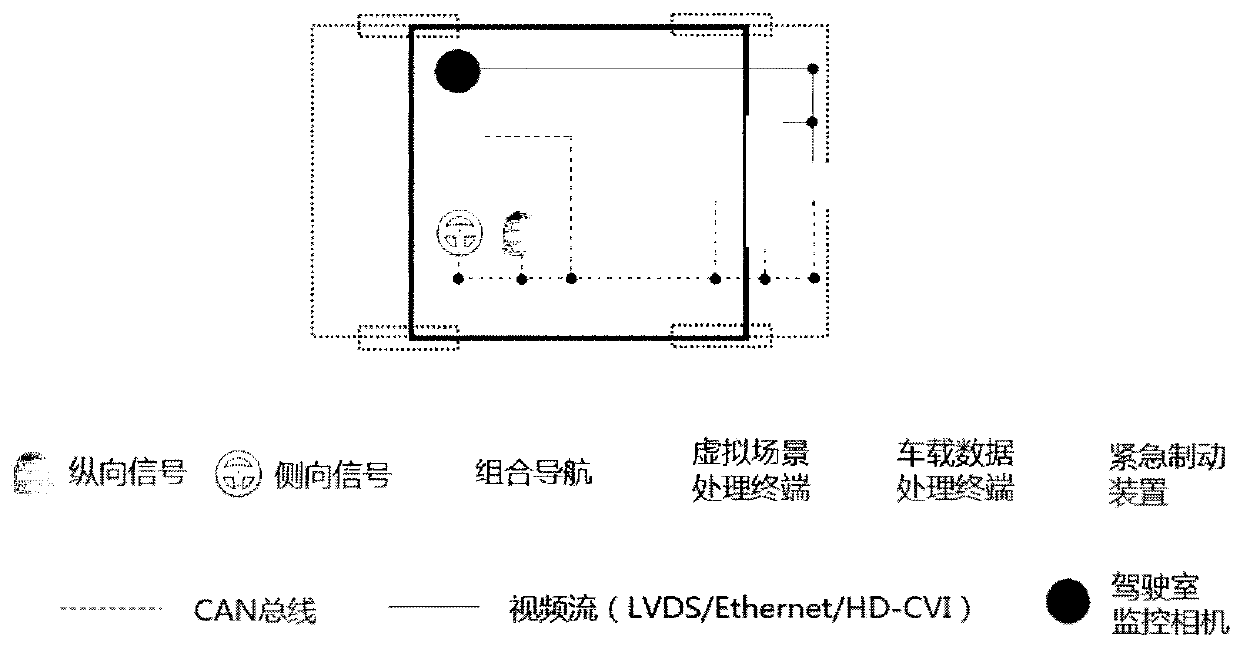
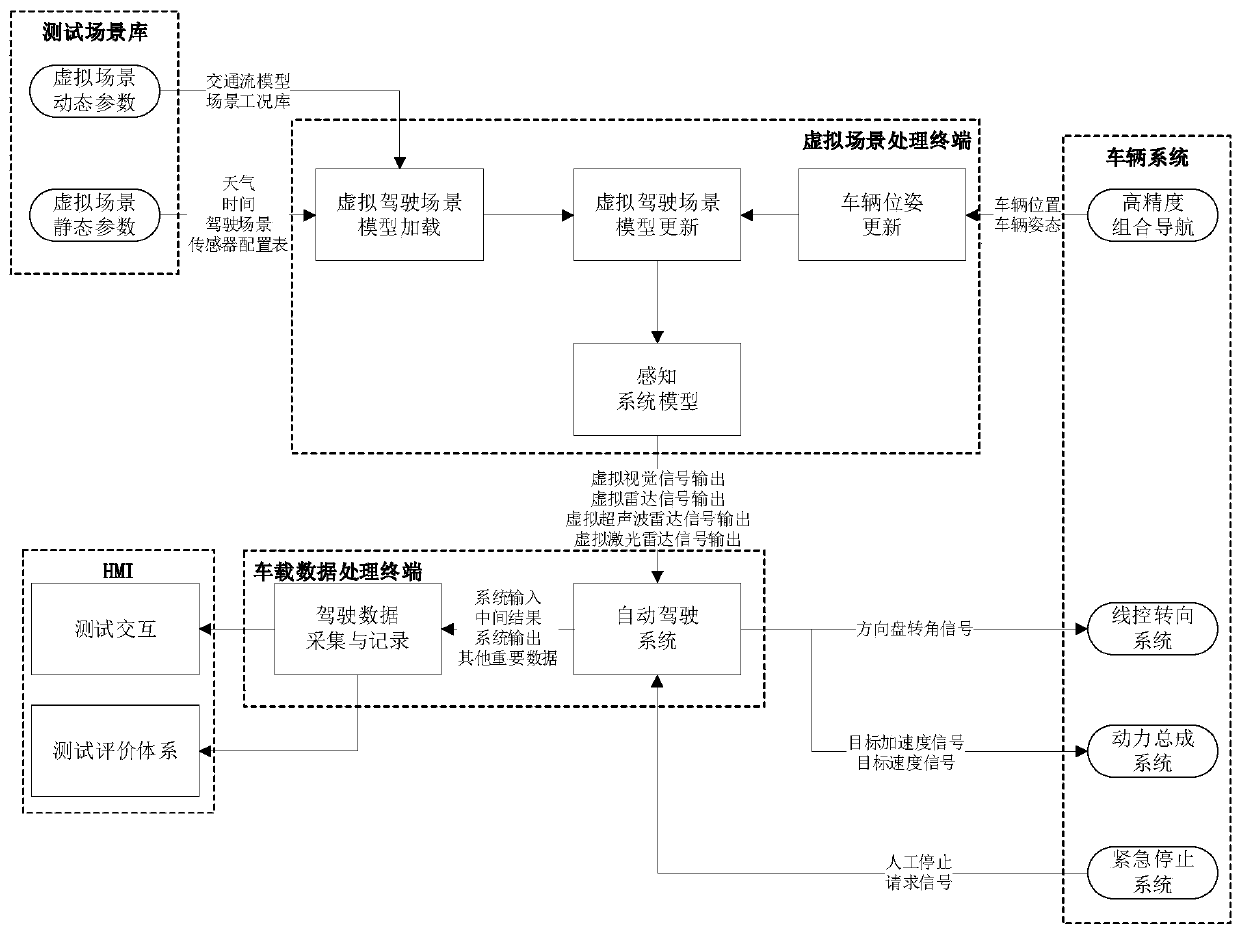
[0054] Embodiment: The L3-level automatic driving system testing method based on the virtual driving scene vehicle-in-the-loop in this embodiment is based on the system hardware architecture such as figure 1 As shown, the cab monitoring camera and emergency braking device are installed in the front of the car, and the virtual scene processing terminal, vehicle data processing terminal and integrated navigation equipment are installed in the rear of the car. The on-vehicle data processing terminal is equipped with a vehicle data acquisition system; the virtual scene processing terminal is equipped with a virtual driving scene library; The control mode is connected with the automatic driving system and the braking system. The test interaction system and evaluation system, in the form of APP or host computer software, are deployed on tablets and test industrial computers or use virtual reality wearable devices to present to testers.
[0055] Vehicle-in-the-loop testing method fo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More