

Flexible object stacking method and storage medium
A flexible object and laser technology, applied in the direction of lifting devices, etc., can solve the problems of unfavorable AGV promotion and application, reduce the transportation efficiency of flexible objects, and cannot realize fully automatic handling and delivery of goods, so as to achieve simple and direct detection methods and improve stacking efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] Below according to accompanying drawing, further illustrate technical scheme of the present invention:
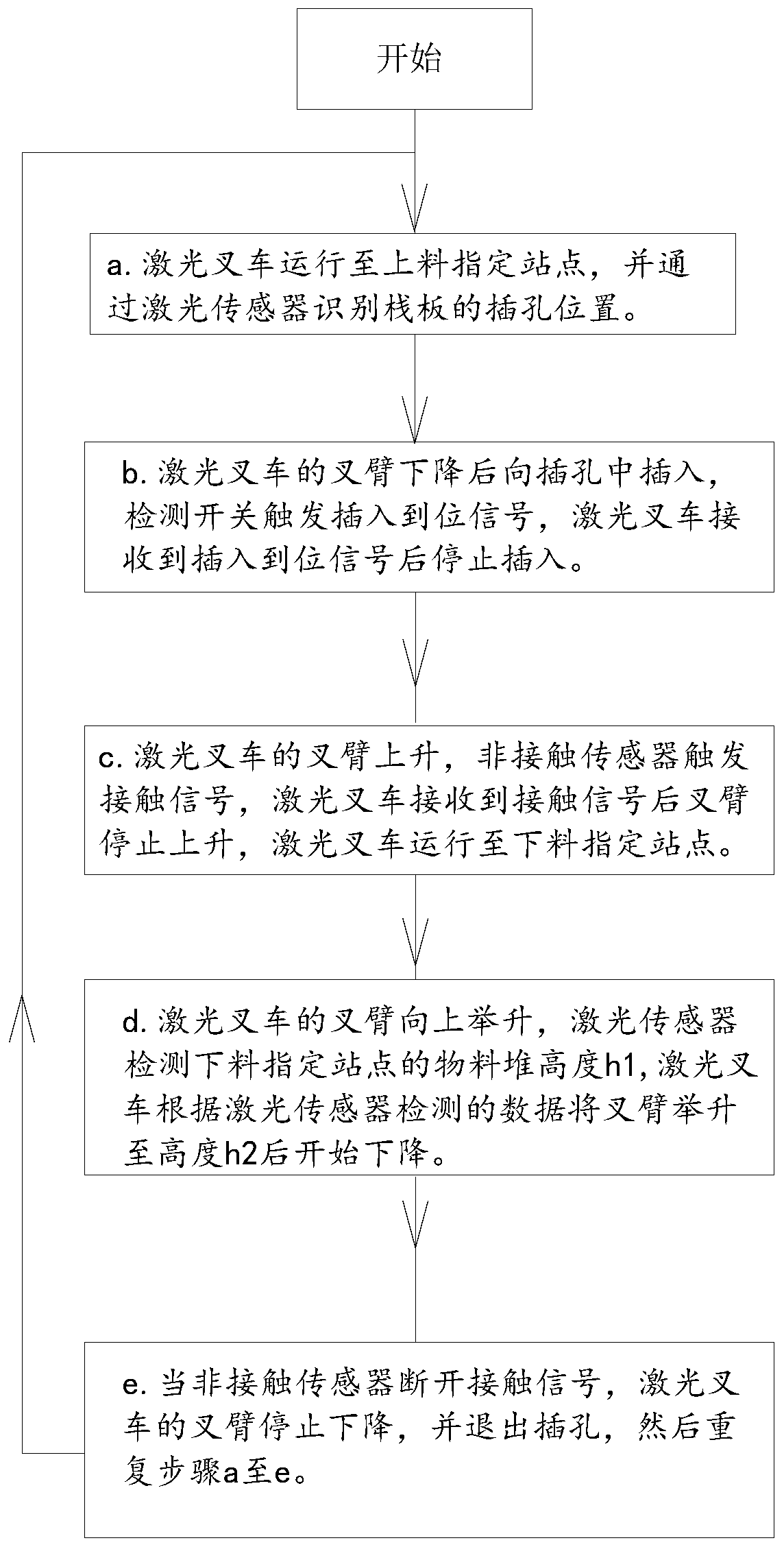
[0036] see figure 1 As shown, the present invention discloses a method for stacking flexible objects, which includes the following steps:
[0037] a. The laser forklift runs to the designated station for loading materials, and recognizes the jack position of the pallet through the laser sensor; b. The fork arm of the laser forklift is lowered and inserted into the jack, and the detection switch recognizes the insertion in place signal, and the laser forklift receives the insertion in place signal Stop the insertion after the signal; c. The fork arm of the laser forklift rises, and the contact signal is triggered by the non-contact sensor. After the laser forklift receives the contact signal, the fork arm stops rising, and the laser forklift runs to the designated station for unloading; d. The fork arm of the laser forklift Lifting up, the laser sensor detects the he...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More