

Three-degree-of-freedom parallel mechanism without accompanying movement
A technology with accompanying motion and degrees of freedom, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., to achieve high running accuracy, strong bearing capacity, and easy controller design.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings, so that the advantages and features of the present invention can be more easily understood by those skilled in the art, so as to define the protection scope of the present invention more clearly.
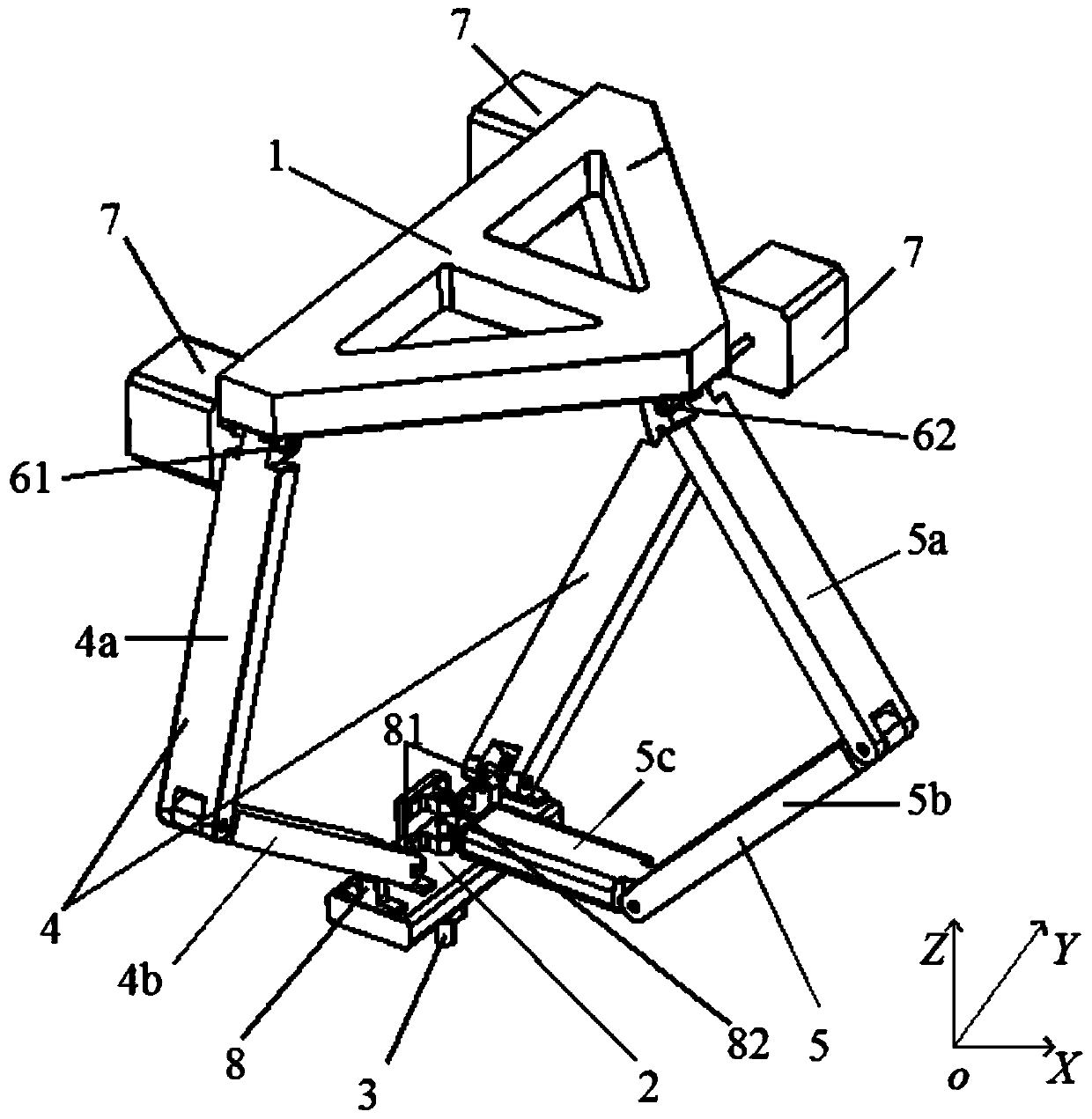
[0030] In the present invention, if figure 1 The three-coordinate system is set as shown, the Z-axis is the vertical direction, and the X-axis and Y-axis are two axes perpendicular to each other in the horizontal direction.
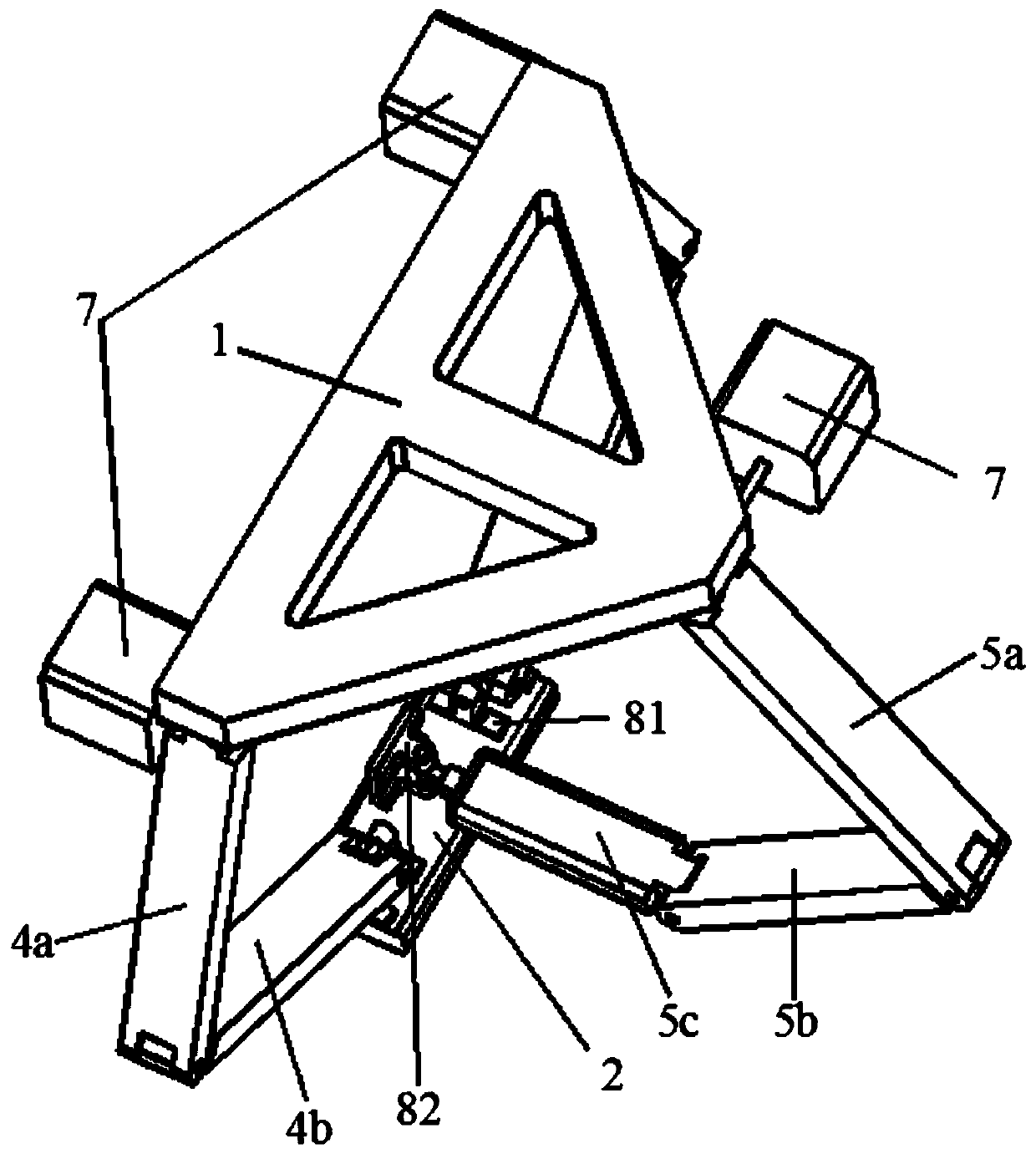
[0031] refer to Figure 1-2 As shown, the three-degree-of-freedom parallel mechanism without accompanying motion of the present invention includes:
[0032] The static platform 1 is fixedly arranged on the external device;
[0033] The moving platform 2 is connected with the static platform 1 through a flexible drive chain;
[0034] Among them, the flexible drive chain includes:
[0035] Two three-joint movable component...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More