

Robot teleoperation system and method based on electromagnetic force feedback and augmented reality
An augmented reality and operating system technology, applied to instruments, manipulators, mechanical mode conversion, etc., can solve problems such as lack of force feedback, limited viewing angle, lack of immersion and lack of precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
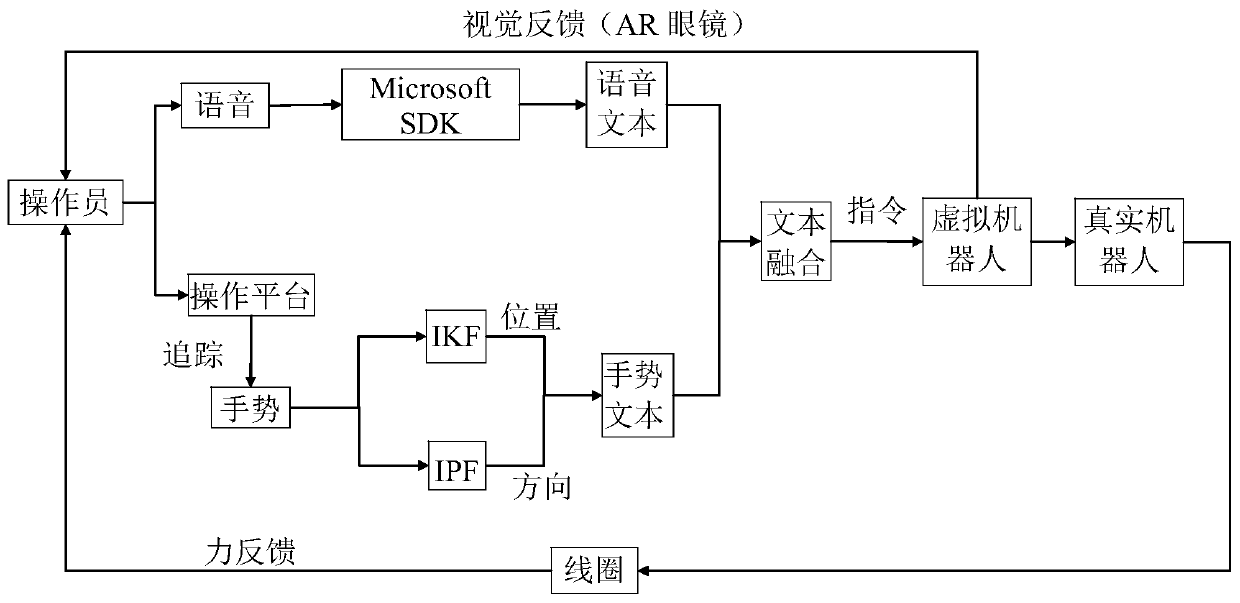
[0053] Robot teleoperation system based on electromagnetic force feedback and augmented reality, such as figure 1 As shown, including: natural control module, natural feedback module;
[0054] The natural control module includes a movable operating platform, a voice acquisition module, a virtual robot and a remote real robot; , extracting robot control instructions through inference method to guide the virtual robot movement, the virtual robot receives the robot control instructions and moves according to the instructions, and sends the motion data to the remote real robot through the Internet, and the remote real robot receives the data and replicates the virtual robot’s actions ;
[0055] The natural feedback module includes an electromagnetic force feedback module and a visual feedback module; the electromagnetic force feedback module is used to make the operator feel the force of the robot, and the visual feedback module is used to make the operator observe the virtual robo...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Cone angle | aaaaa | aaaaa |
| Height | aaaaa | aaaaa |
| Bottom radius | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More