

Distributed task processing method, device and system, robot and storage medium
Patent Information
- Authority / Receiving Office
- CN · China
- Current Assignee / Owner
- UBTECH ROBOTICS CORP LTD
- Publication Date
- 2020-02-21
Smart Images
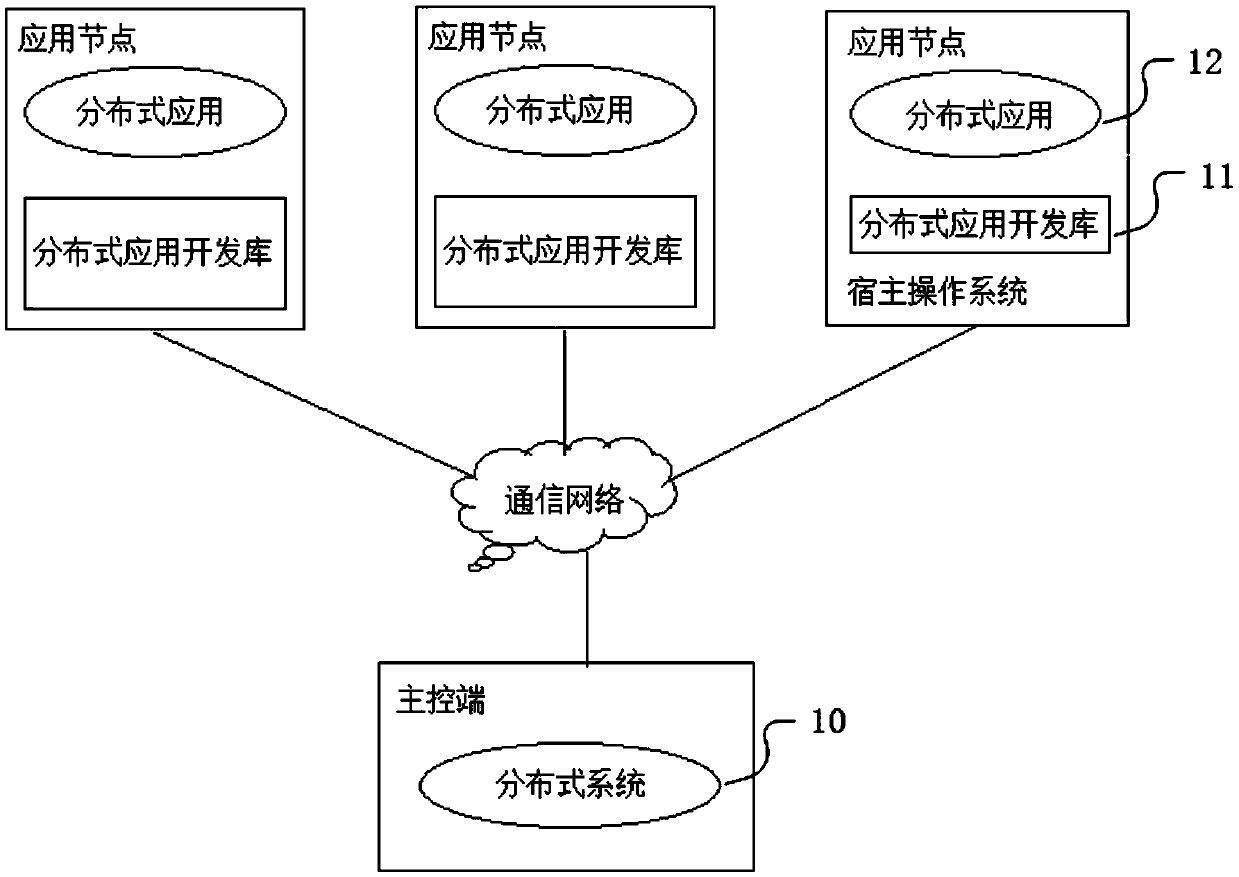
Figure 1 
Figure 2 
Figure 3
Abstract
Description
technical field
[0001] The present invention relates to the technical field of robots, in particular to a distributed task processing method, device, system, robot and storage medium. Background technique
[0002] In the robot, various sensors such as infrared, ultrasonic, radar, depth camera, color camera, pyroelectric, microwave, GPS, servo driver, motor driver and other driving devices are often distributed, as well as display devices for human-computer interaction, Mobile App, PC client and other human-computer interaction equipment, these application nodes such as sensors, drive devices and human-computer interaction equipment communicate with each other and coordinate work to realize the complete function of the robot.
[0003] In order to meet the increasingly complex functional requirements of robots, many distributed task processing systems have emerged, such as ROS (Robot Operating System) systems, but the operation of distributed systems and distributed applicatio...