Cooperative Adaptive Anti-disturbance Longitudinal Control Method for Nonlinear Vehicle Platooning
A longitudinal control and self-adaptive technology, which is applied to the traffic control system, traffic control system, arrangement of road vehicles, etc., can solve problems such as difficult accurate modeling and system instability, and achieve the effect of ensuring stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
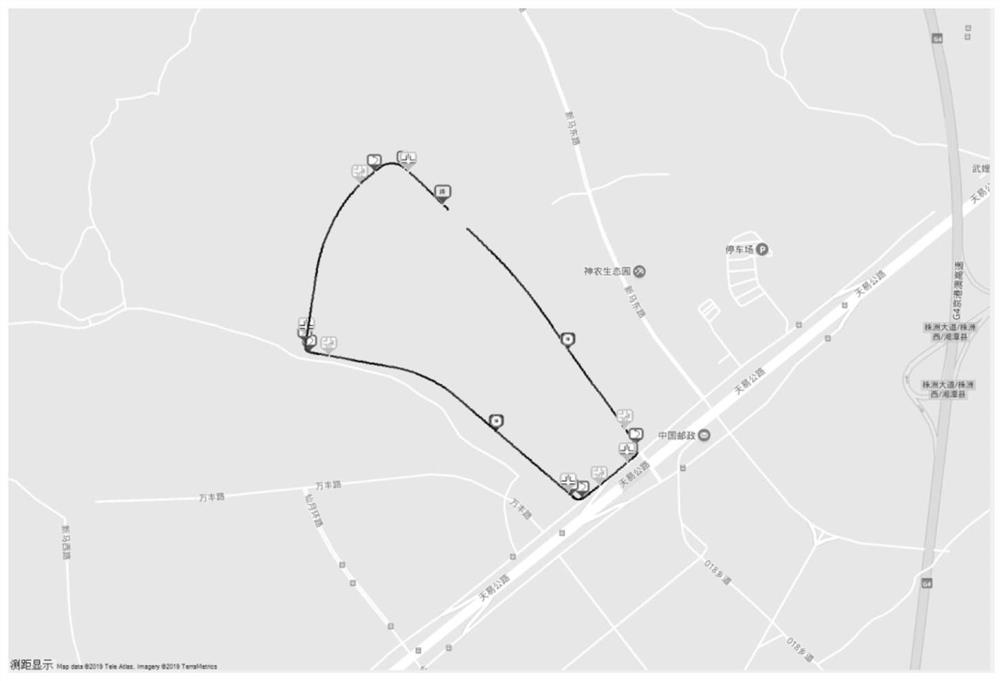
[0035] In this example, three 10m-long intelligent driving buses form a vehicle queue. Each vehicle is equipped with Xingwang Yuda XW-GI7660 combined inertial navigation and Xingyun interconnected intelligent vehicle terminal V-Box. The real-time position, heading and speed of the vehicle are all controlled by The combined inertial feedback, as in figure 1 The entire length shown is about 3.5 kilometers, including four curves, two-way four-lane vehicle platoon cooperative adaptive anti-disturbance longitudinal control experiment.
[0036] The control structure of the present invention is as Figure 5 Shown, the realization process of the present invention comprises the following steps:
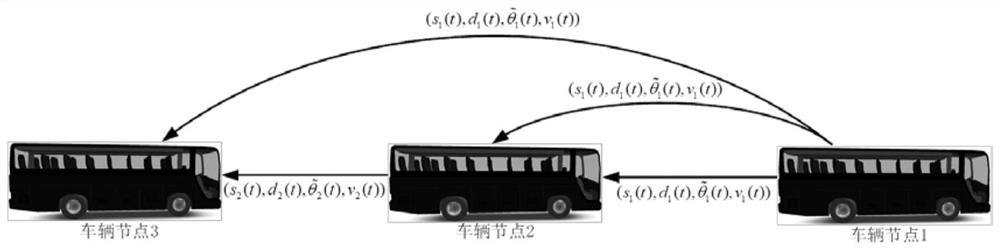
[0037] 1) Construct the leader-front vehicle following type vehicle formation, in the said vehicle formation along the traveling direction of the vehicle, the leading vehicle is the leader vehicle, and other vehicles are follower vehicles;
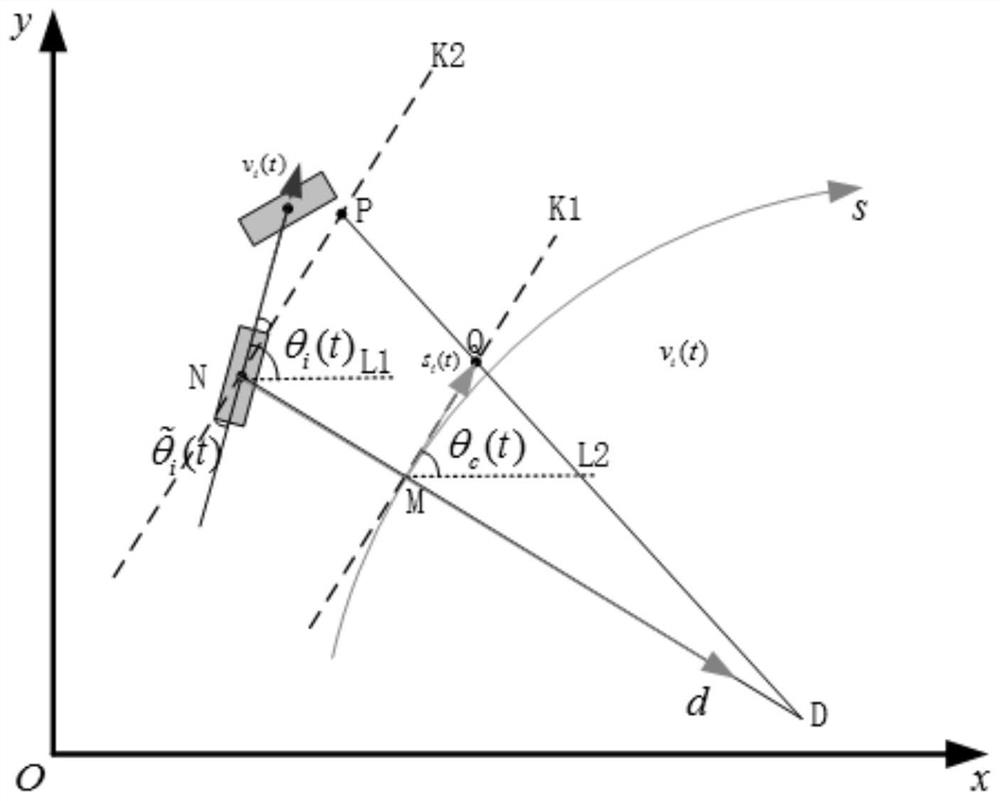
[0038] 2) Establish the kinematics model of the ve...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More