Small four-wheel drive intelligent water surface unmanned ship platform and control method thereof
A platform control and unmanned ship technology, which is applied in unmanned surface ships, ship construction, ship propulsion, etc., can solve problems such as insufficient maneuverability, small turning moment, and limitation of turning radius, so as to increase application scenarios, large turning Ship moment, enhanced maneuverability effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
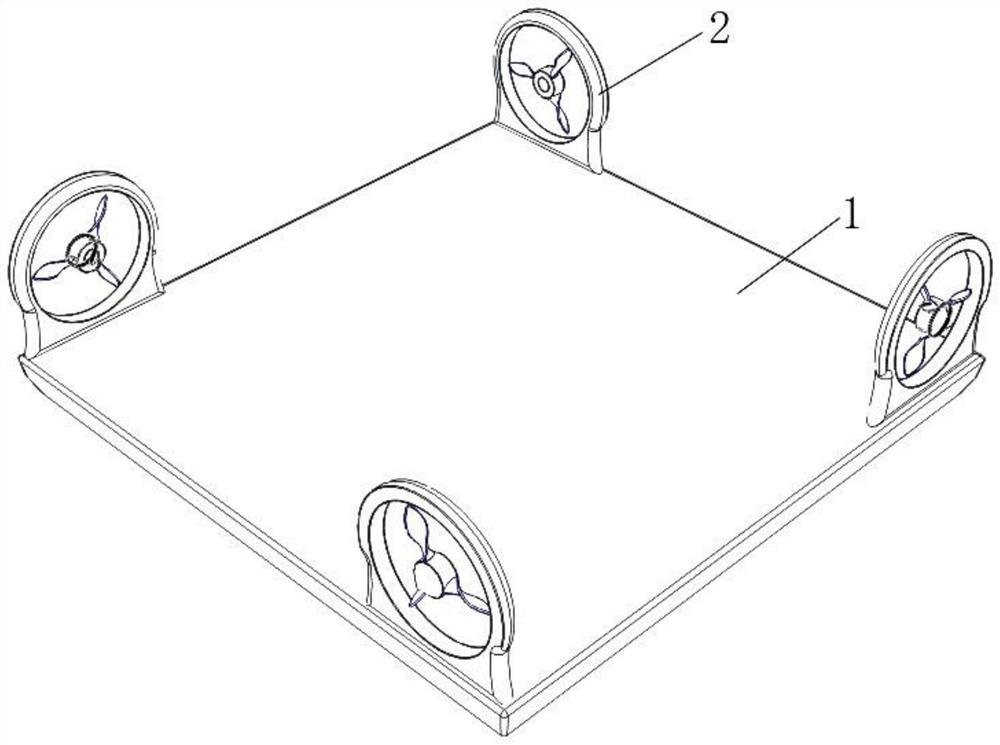
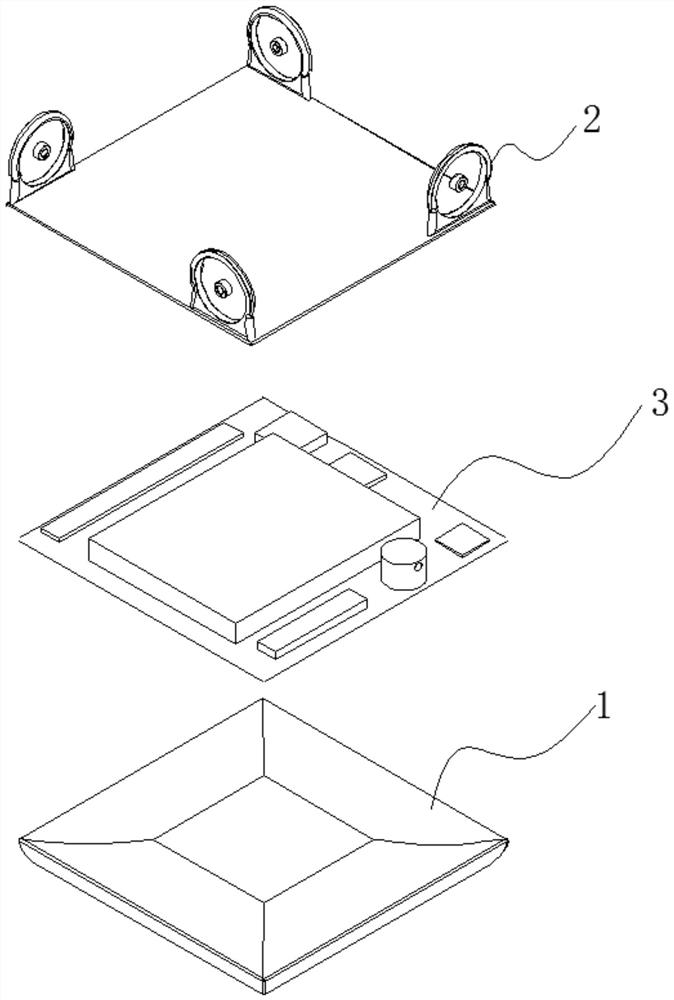
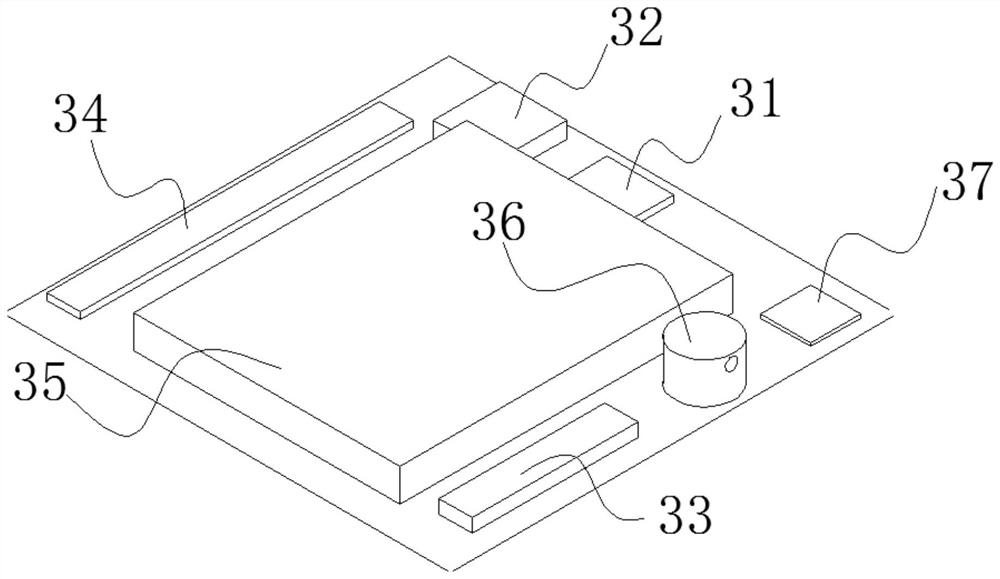
[0038] refer to Figure 1 ~ Figure 2 As shown, a small-scale four-wheel-drive intelligent surface unmanned ship platform includes: a platform main body 1, a driving propeller 2 arranged above the platform main body 1, and a control assembly 3 arranged on the platform main body 1 and communicating with the driving propeller 2;
[0039] Wherein, the platform main body 1 is a regular polygon setting (such as a rectangle, a regular hexagon, and a regular octagon) for an even number of sides, and each side of the platform main body 1 is provided with a drive propeller 2, and the platform main body 1 is every two The driving directions of the driving propellers 2 arranged on two parallel opposite sides are on the same straight line. This type of drive structure has stronger maneuverability, higher control precision, and stronger environmental adaptability to adapt to small and complex waters such as lakes and rivers.
[0040] Preferably, the platform main body 1 is set in a square ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More