

Pedestrian avoiding method and device, vehicle and storage medium
A pedestrian and vehicle technology, applied in the fields of vehicles and storage media, devices, and pedestrian avoidance methods, can solve the problems of vehicle avoidance, vehicles unable to avoid vehicles and pedestrians in time, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
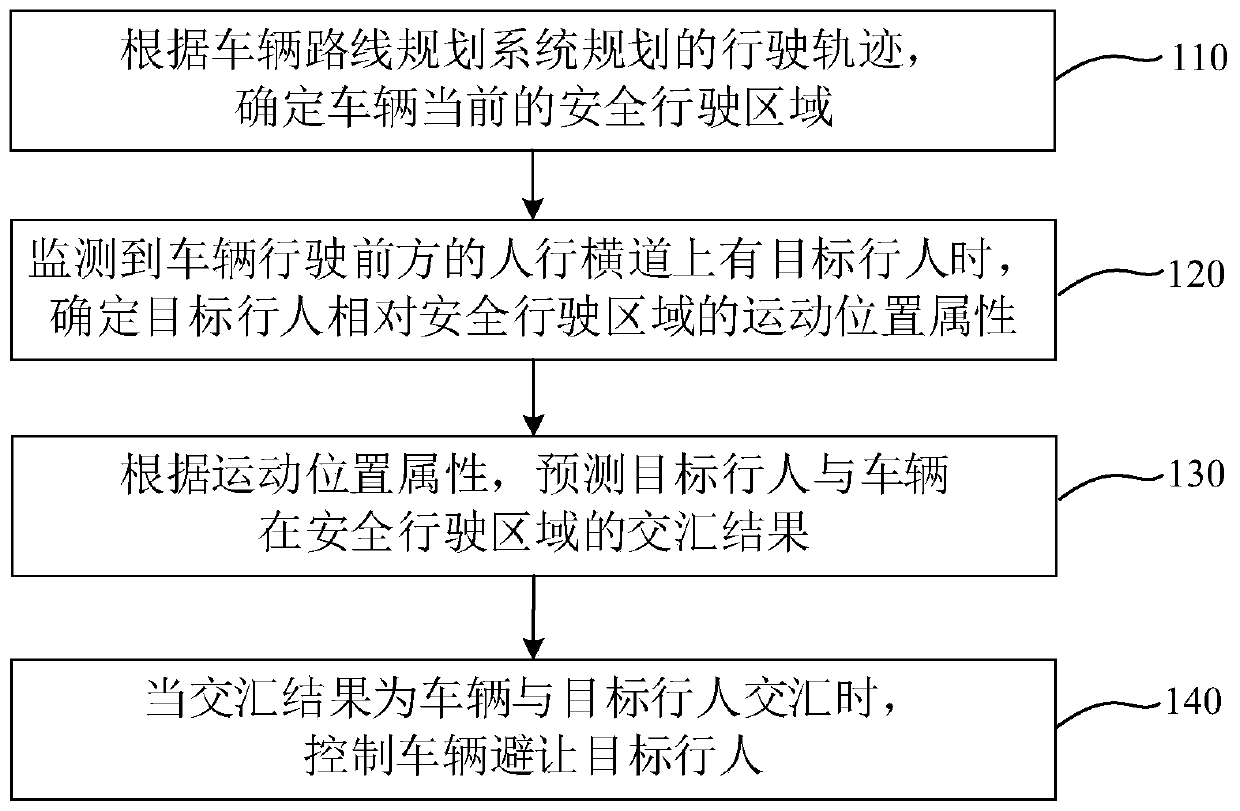
[0033] figure 1 It is a flow chart of the pedestrian avoidance method provided in Embodiment 1 of the present invention. This embodiment is applicable to the situation where the vehicle avoids pedestrians. The method of the vehicle driving system can be executed by the pedestrian avoidance device, which can be realized by software and / or hardware , the device can be installed on the vehicle.
[0034] Such as figure 1 As shown, the method may specifically include the following steps:
[0035] Step 110: Determine the current safe driving area of the vehicle according to the driving trajectory planned by the vehicle route planning system.
[0036] Among them, the route planning system is a vehicle system used by self-driving vehicles to automatically plan vehicle trajectory and navigation according to the origin and destination. The driving trajectory is the movement trajectory of the vehicle during driving. In the embodiment of the present invention, the driving track plan...
Embodiment 2
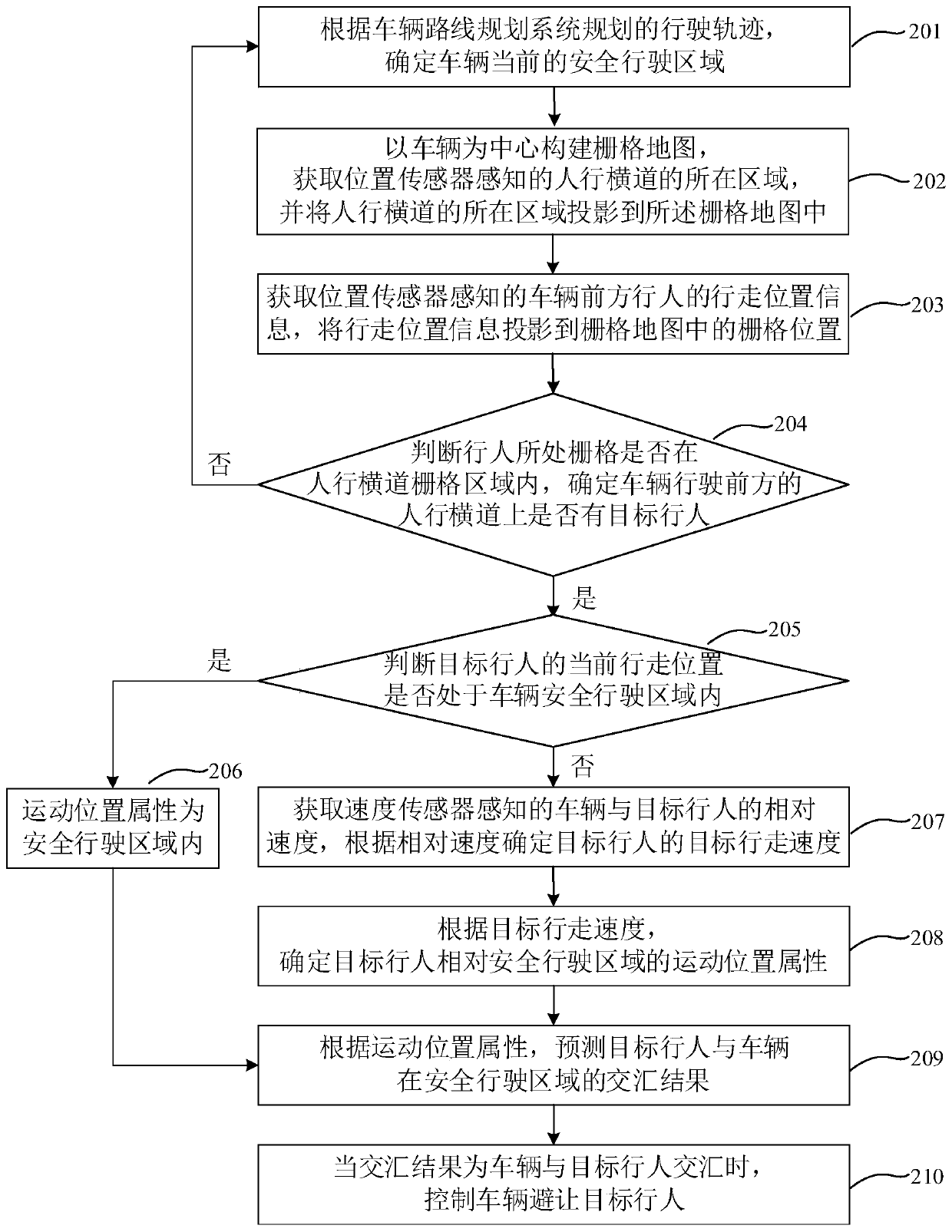
[0051] figure 2 It is a flow chart of the pedestrian avoidance method provided by Embodiment 2 of the present invention. On the basis of the foregoing embodiments, this embodiment further optimizes the foregoing pedestrian avoidance method. Correspondingly, such as figure 2 As shown, the method of this embodiment specifically includes:
[0052] Step 201: Determine the current safe driving area of the vehicle according to the driving trajectory planned by the vehicle route planning system.
[0053] Step 202, constructing a grid map with the vehicle as the center, acquiring the area where the pedestrian crossing is located sensed by the position sensor, and projecting the area where the pedestrian crossing is located into the grid map.
[0054] Among them, a raster image refers to an image that has been discretized in both space and brightness. A raster image can be considered as a matrix. Any element in the matrix corresponds to a point in the image, and the correspondin...
Embodiment 3
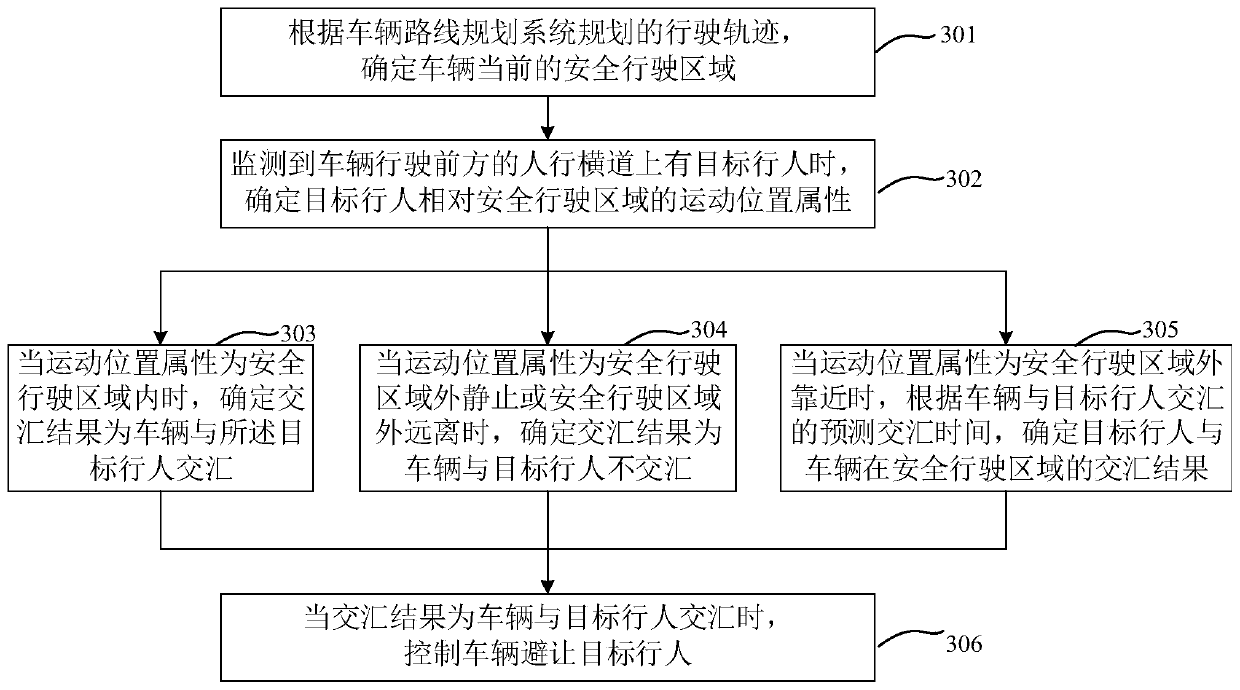
[0086] image 3 It is a flow chart of the pedestrian avoidance method provided by Embodiment 3 of the present invention. On the basis of the foregoing embodiments, this embodiment further optimizes the foregoing pedestrian avoidance method. Correspondingly, such as image 3 As shown, the method of this embodiment specifically includes:
[0087] Step 301. Determine the current safe driving area of the vehicle according to the driving trajectory planned by the vehicle route planning system.
[0088] Step 302 , when a target pedestrian is detected on the crosswalk in front of the vehicle, determine the motion position attribute of the target pedestrian relative to the safe driving area.
[0089] After the motion location attribute is determined, step 303 to step 305 are performed according to different motion location attributes.
[0090] Step 303, when the attribute of the moving position is within the safe driving area, determine that the result of the intersection is the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More