

Unmanned perception based unmanned aerial vehicle route planning method
An unmanned vehicle and path planning technology, applied in the field of image processing, can solve problems such as limited effect of auxiliary planning, affecting driving safety, vehicle stagnation, etc., to simplify the composition structure and system construction operation, clear road traffic information, and work. steady state effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described below in conjunction with accompanying drawing:
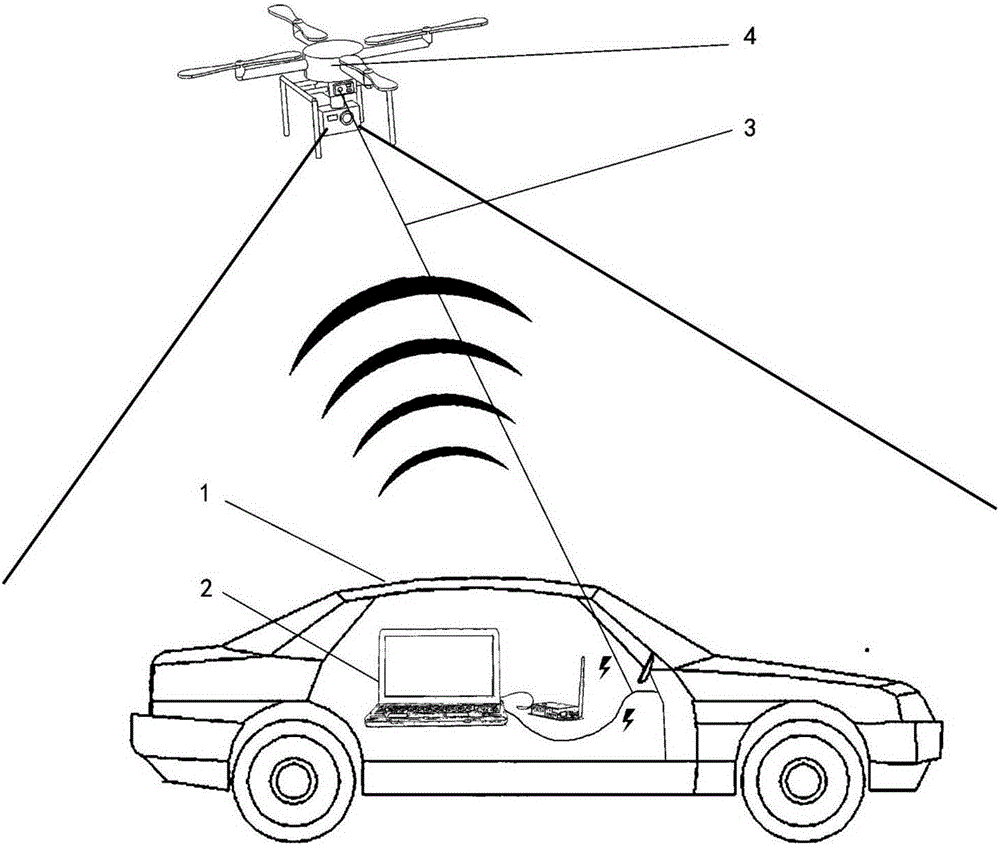
[0027] Such as figure 1 As shown, the UAV perception system adopted by the present invention includes: a target vehicle 1 that needs path planning, a ground station 2 , a mooring rope 3 , and an UAV 4 . The ground station 2 is placed on the target vehicle 1 and powered by the vehicle 1 , and the unmanned aerial vehicle 4 is powered by the vehicle 1 through the tethering rope 3 .
[0028] The unmanned aerial vehicle 4 of the embodiment of the present invention is a quadrotor unmanned aerial vehicle. The UAV 4 is equipped with a GPS (Global Positioning System) module, an AHRS (Heading Attitude Reference System) module and a flight control device to ensure the stable and safe flight of the UAV. The unmanned aerial vehicle 4 is equipped with a stabilizing platform and a camera device to realize the stable shooting of the unmanned aerial vehicle on the road surface and obtain ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More