

Ankle joint rehabilitation robot structure and using method thereof
A rehabilitation robot, ankle joint technology, applied in passive exercise equipment, physical therapy and other directions, can solve the problems of not many types of ball pairs, limited space angle, many driving parts, etc., to ensure the movement space of the mechanism, reduce costs, control The effect of aspect simplification
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] In order to make the above-mentioned features and advantages of the present invention easier to understand, the following specific embodiments are described in detail with reference to the accompanying drawings, but the present invention is not limited thereto.
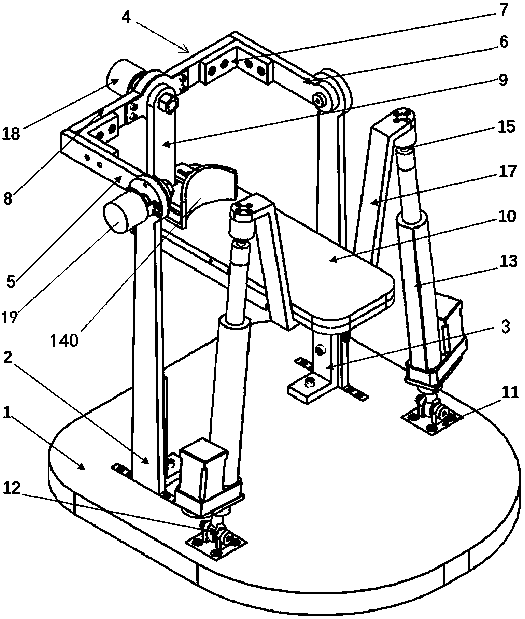
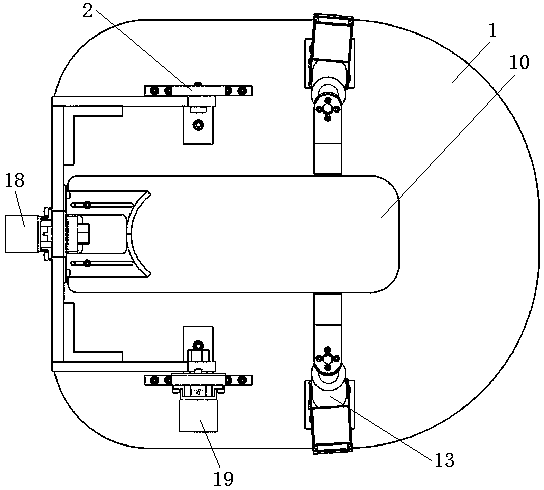
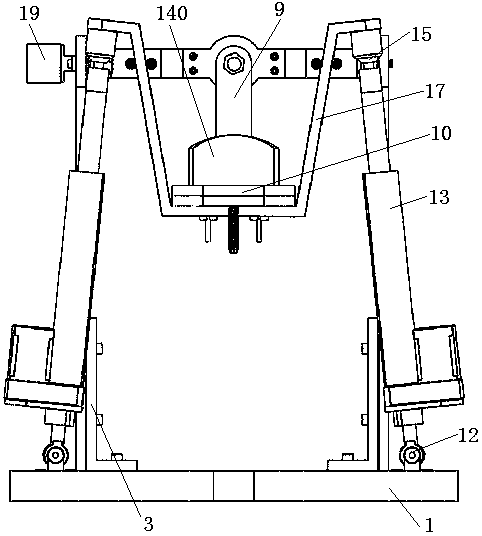
[0033] refer to Figure 1 to Figure 8
[0034] An ankle joint rehabilitation robot structure can be simply described as RR / 2SPS structure, in which RR means that the support is the support of the rotating pair; 2 means that the mechanism uses two electric push rods, and S means that the lower side of the electric push rod is connected to the fixed platform by a ball pair. The front and rear rotation space does not need to be too large, so the use of a fisheye pair instead of a ball pair can also ensure the movement of the mechanism. P represents the push rod, and S is the ball pair used to connect the electric push rod and the moving platform connecting rod.
[0035] A specific ankle joint rehabilitation robot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More