

A method and system for automatically adjusting the working posture of a forklift working device
A working device and automatic adjustment technology, applied in the direction of lifting device, etc., can solve the problem of bumping of the whole machine
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
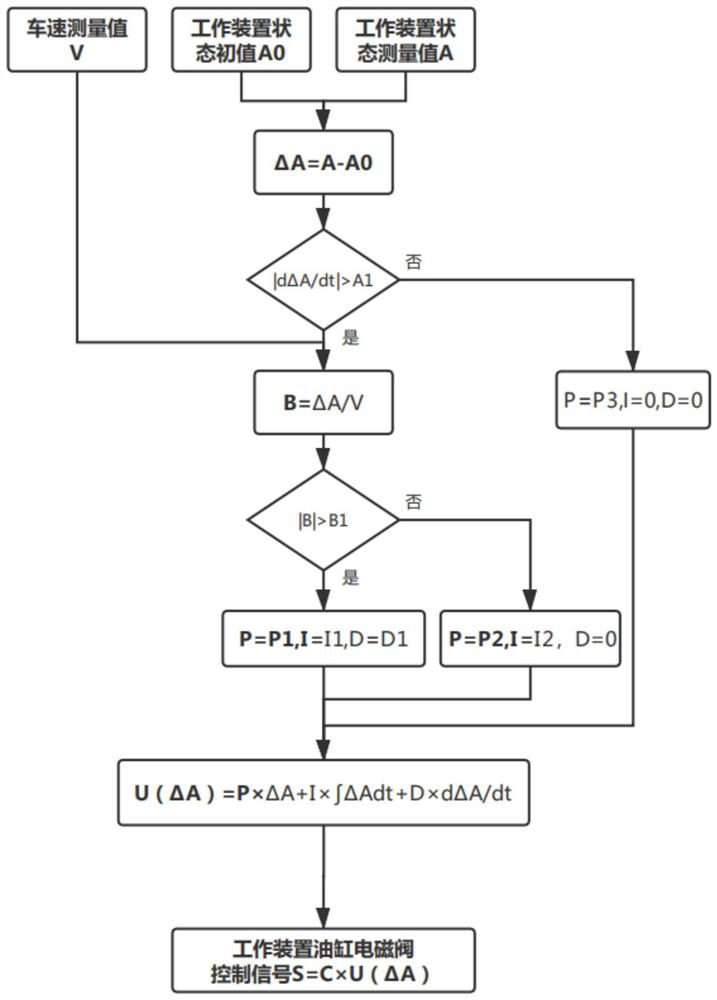
[0053] This embodiment provides a method for automatically adjusting the working attitude of a forklift working device, such as figure 1 As shown, the control method for automatically adjusting the working posture of the forklift working device includes:
[0054] S1, after the forklift starts to drive with cargo, obtain the initial attitude value A0 of the forklift working device; and collect the attitude measurement value A of the forklift working device in real time after obtaining the initial attitude value A0;
[0055] It should be noted that the storage conditions for the initial attitude value A0 of the forklift working device are: the direct or indirect drive cylinder of the forklift working device does not act (the controller has no output), the forklift has a driving or steering action, and the preset time is maintained; Specifically, in this embodiment, the preset time is 3 seconds.
[0056] The attitude of the working device of the forklift can include the angle of...
no. 2 example
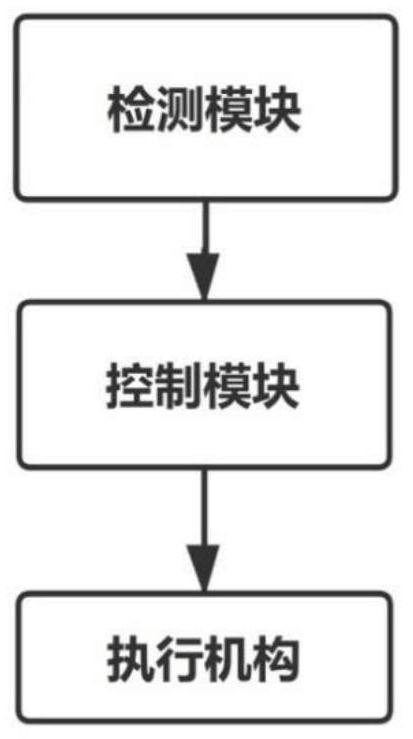
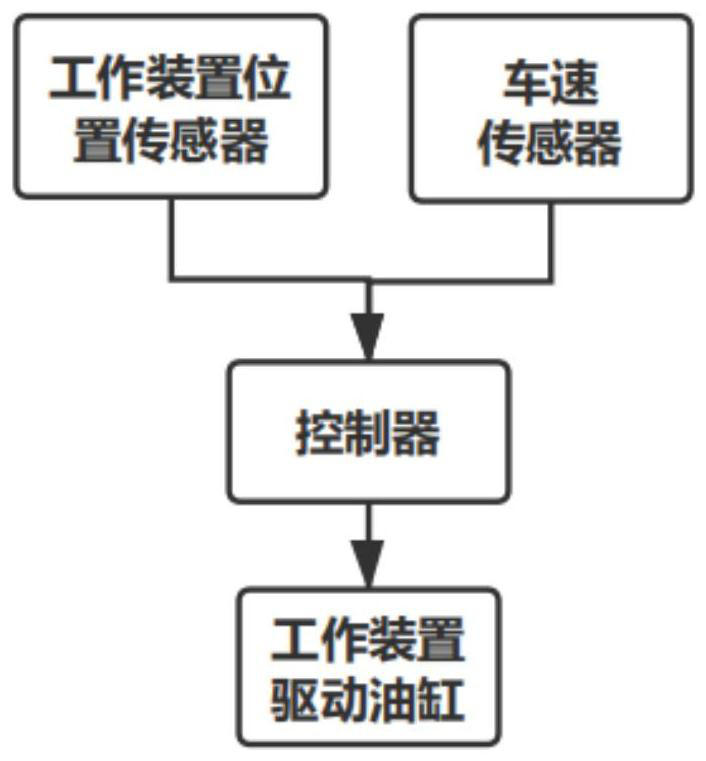
[0081] This embodiment provides a control system for automatically adjusting the working posture of a forklift working device, such as figure 2 As shown, the automatic adjustment control system for the working posture of the forklift working device includes:
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More