A control method and system for automatic adjustment of working attitude of excavator working device
A working device and automatic adjustment technology, applied in the direction of earth mover/shovel, construction, etc., can solve the problem of bumping and other problems of the whole machine, and achieve the effect of offsetting the impact
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
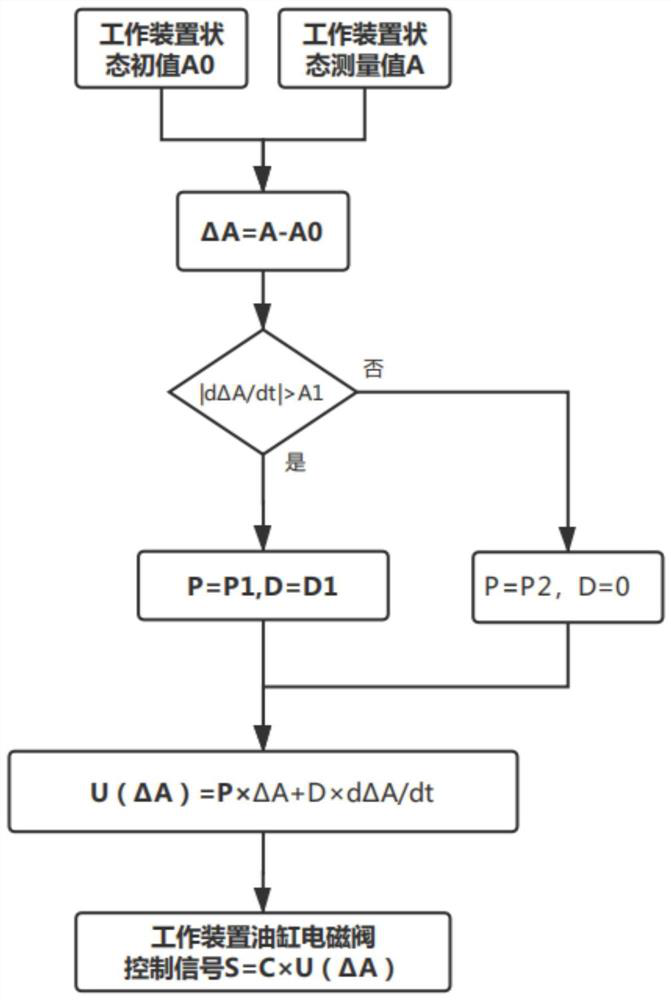
[0042] This embodiment provides an automatic adjustment control method for the working posture of the excavator working device, such as figure 1 As shown, the automatic adjustment control method for the working posture of the excavator working device includes:
[0043] S1, after the excavator completes the material collection, obtain the initial attitude value A0 of the working device of the excavator; and collect the attitude measurement value A of the working device of the excavator in real time after obtaining the initial value A0 of the attitude;
[0044] It should be noted that the storage conditions for the initial value A0 of the attitude of the excavator working device are: the direct or indirect driving cylinder of the excavator working device does not move (the controller has no output), the excavator has a driving or steering action, and maintains the preset time; specifically, in this embodiment, the preset time is 3 seconds.
[0045] The attitude of the working d...
no. 2 example
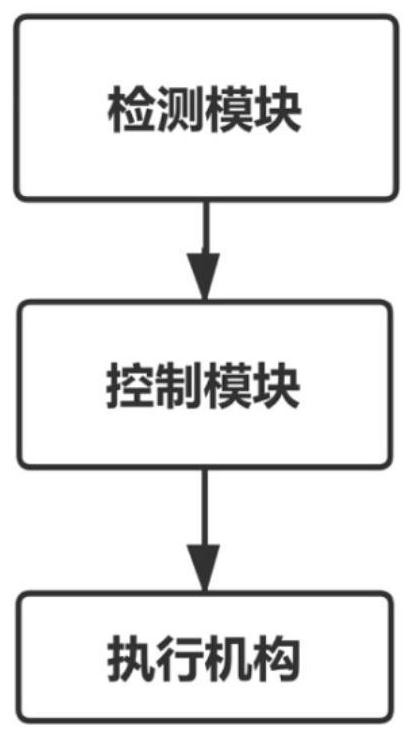
[0063] This embodiment provides an automatic adjustment control system for the working posture of the excavator working device, such as figure 2 As shown, the automatic adjustment control system of the working posture of the excavator working device includes:
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com